1. Introduction
The FOWT industry is not yet in the mature stage of development and currently, the fixed bottom foundation/platform is the dominant technology in the offshore wind turbine (OWT) sector (Zheng and Lei, 2018). However, the concept of floating offshore wind turbines was proposed by Heronemus (1972)as far back as 1972. In as much as Heronemus’ vision was dated back to 1972, it was in the mid-1990s that FOWT started becoming a widespread concept after which several configurations of floating support platforms are being developed for OWTs and performance of the concepts tested by numerical and experimental methods (Wang et al., 2010; Zheng and Lei, 2018).
Three main floater concepts from the oil and gas industries have been adopted by the offshore wind sector: Spar, Semi-submersible, and Tension-Leg Platform (TLP). In 1998, the concept design for “FLOAT” – a Spar concept floating wind turbine - was presented in (Tong, 1998). The objective of the FLOAT concept is to allow the economical generation of electricity from wind power in offshore locations with water depth as deep as 100 m–300 m. For the semi-submersible concept, Henderson and Patel (1998) presented an analytical and numerical design tools for evaluating the performance of semi-submersible floating wind turbines. Their focus was on the determination of an optimum hull form for the floating structure and on developing analysis tools for the interaction of the motion in waves of the platform, with the turbine aerodynamic performance as well as the blade and hub loads. Development of the TLP floaters came later, as reported in Withee (2004) and Wang et al. (2010). Withee (2004) performed a fully coupled time-domain simulations of the system responses for a 1.5 MW wind turbine mounted on a TLP floater, under wind and wave forces. They presented the simulation results for surge free decay tests carried out to estimate the damping arising from the turbine rotor, and the wave and viscous damping arising from the buoy. They found that the two damping mechanisms were comparable in magnitude.
Since the early days of OWT floaters highlighted above, extensive systems engineering analyses have been conducted in literature, and it was not until 2017 that the first commercial floating offshore wind farm went operational (WindEurope, 2019). However, with the world in urgent need to reduce the carbon emission footprint, to revert the existing trend of global warming and the need to reduce the levelized cost of electricity generated from wind, there have been increasing interest in the floating foundation/support for wind turbine system in recent years (Wang et al., 2010). Also, as offshore wind turbine installation frontiers gradually move into deeper waters with abundant and high-quality wind resources, the need for FOWT system has become imperative as the reliable fixed support/monopile foundation offshore wind turbines become very cost prohibitive in such environmental conditions (deep water >60m), as mentioned in Leimeister et al. (2018); Lefebvre and Collu (2012) and Dan Kyle Spearman (2020).
The substructure/platform for a FOWT system can account for circa 29.5% of the capital expenditure (CAPEX), while the corresponding substructure/foundation of a fixed bottom wind turbine accounts for 13.5% of CAPEX of the system (Ioannou et al., 2020); hence, the need for optimization or conducting a geometric shape parameterization technique with optimization on the substructure of the FOWT system to provide efficient means of reducing the costs is deemed more urgent than for offshore fixed bottom wind turbines. In addition, due to the complexity of the dynamic behaviour of a FOWT system, there is need to balance the design and optimization of the substructures and the computational cost (time) with adequate optimization framework using MDAO technique. Balancing the optimization process of the FOWT substructure with the computational cost is a very important trade-off, that should be considered in the MDAO of FOWT substructure. Ensuring the balance is to make use of the right model fidelity (high fidelity, multi-fidelity/surrogates, and low fidelity models) to explore the design space. Any selected model can subsequently be verified with a high-fidelity tool.
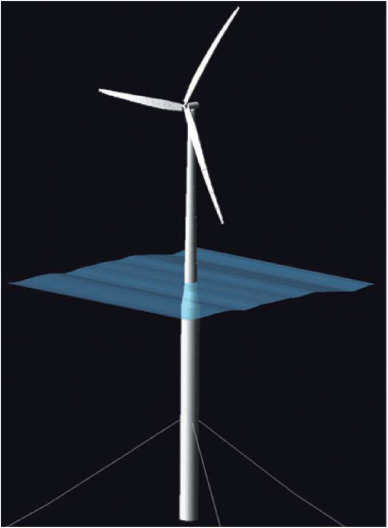
A FOWT is an engineering system with a multidisciplinary set of complex subsystems, as indicated in Fig. 1. These kinds of complex systems, in other industries, have successfully been optimized adopting a MDAO approach. MDAO is a systems engineering methodology that uses numerical optimizationtechniques to design and analyse multidisciplinary engineering systems like a FOWT system (Perez-Moreno et al., 2016). This tool is perfect for both present and future design and analysis requirements for conducting or executing the optimization of various multidisciplinary systems.
 Fig. 1. Floating Offshore Wind Turbine System, adapted with permission from (Jonkman and Matha, 2011).
Fig. 1. Floating Offshore Wind Turbine System, adapted with permission from (Jonkman and Matha, 2011).MDAO is advantageous as it permits designers and engineers to incorporate all necessary disciplines simultaneously to explore the design and analysis space and select the optimal solution. This is a much superior approach to the sequential design and analyses process as it can exploit the integration and interface between disciplines. It is also a much quicker approach in comparison to when each discipline is treated as a standalone. However, simultaneous inclusion of multi-disciplines increases the complexity of the problem and poses some challenges. To execute an MDAO involves overcoming design and analysis challenges amongst which are design parameterization, computational time from modelling techniques and exploration of design space (Sclavounos et al., 2008). Overcoming the challenges requires an optimization framework that uses the right model fidelity within the MDAO framework (high fidelity, multi-fidelity, low fidelity) to solve the problem.
This review focuses on the FOWT substructure (the platform, anchors and mooring system) as defined in the International Electrotechnical Commission's technical specification (IEC-61400-3-2, 2019). Section 1 is an introduction to the early work done on FOWT system with a definition of MDAO. It also sets the scene for the scope of the paper. Section 2 details the design, parameterization and analysis approaches of FOWT substructures. Section 2.1 gives an overview of the FOWT substructures' classification, Section 2.2 details the design of a FOWT substructure in accordance to technical standards and guidelines, Section 2.3 discusses the parameterization of FOWT substructure with a focus on geometric shape parameterization techniques that have been successfully used in industries like aerospace, offshore oil and gas and automobile sectors, Section 2.4 provides an overview of the dynamic analysis approach for assessing the response of a FOWT substructure. Section 3 details the MDAO approach for assessing a FOWT system. Section 3.1 provides an overview of MDAO, its development in the aerospace industry, and its use in the offshore industry, Section 3.2 highlights the MDAO workflow, system scope, architecture/framework and model fidelities within the framework while Section 3.3 details MDAO work for FOWT substructures, detailing available optimizers and some of MDAO related work in the offshore wind turbine industry. Section 4 highlights the gaps in MDAO methodologies when applied to the offshore wind turbine sector, and Section 5 presents the main conclusions.
2. Design, parameterization and analysis approaches for floating offshore wind turbine substructures
2.1. Floating offshore wind turbine substructure overview
Different designs of FOWT platforms exist; however, based on the principle exploited to achieve static stability, FOWT substructures can be classified under three classes, detailed in Collu and Borg (2016) and Leimeister et al. (2018)while the advantages and disadvantages of the substructures classification are detailed in Bashetty and Ozcelik (2021) and highlighted below:
-
•
The ballast stabilized platform (Spar) – This category of platform relies mainly on heavy ballast mass located at a deep draft, to ensure the platform's center of mass is well below the center of buoyancy, in order to produce a large restoring moment. Some advantages of a ballast stabilized spar are simple design geometry, higher stability and low wave induced motion on the structure while amongst its disadvantages are higher fatigue loads in tower and its deep-water requirements for installation.
-
•
The buoyancy stabilized platform (semi-submersible/Barges) – This class of support structures uses the water plane area to ensure stability of the platform. A large second moment of water plane area is suitable to raise the metacenter of the platform above the center of mass to ensure platform stability. Advantages of a buoyancy stabilized semi-submersible includes low draft requirements, low mooring costs, transportation ease to installation site and adequate suitability for deep-water utilization. Some of it's disadvantages are its susceptibility to higher wave induced motions and the structural design are complex with several columns and braces.
-
•
The mooring stabilized platform (TLP) – This category of FOWT platform uses taut vertical mooring lines to ensure the stability of the buoyant platform. Some advantages attributed to a TLP substructure includes low wave induced motion, simple structural design and low fatigue loads. Disadvantages associated to a TLP are mainly expensive mooring cost and difficulty in towing to install.
FOWT platforms are designed according to classification guidelines and standards and a fundamental design requirement to be satisfied in the design of FOWT platform is the stability. Different platform types have varying stability mechanisms or contributors as highlighted in (Collu and Borg, 2016). The contributors are waterplane area which results in the waterplane stabilized platform (semi-submersible), ballast which is the main contributor to a ballast stabilized platform (spar) and mooring which results in a mooring stabilized platform (TLP). The main parameters contributing to the roll/pitch restoring moment for the waterplane stabilized platform are the seawater density, acceleration due to gravity and the second moment of waterplane area. For the ballast stabilized platform, the main parameters contributing to the roll/pitch restoring moment are the buoyancy force, center of buoyancy, mass, acceleration due to gravity and center of gravity of the system. The main contributor to the roll/pitch restoring moment of a mooring stabilized platform is the mooring stiffness. While it is possible for the mooring contribution to be considered negligible for catenary mooring systems, it can be the main restoring mechanism for TLP systems (Collu and Borg, 2016).
Apart from the Spar, Semi-submersible, and the TLP platforms mentioned above, new and unique geometrically shaped platforms for the FOWT sector are being developed. Examples of these unique platform designs are the IDEOL “damping pool” barge platforms, the TetraSpar floating concept, and the Hexafloat (Ghigo et al., 2020). The Floatgen IDEOL barge concept is an altered barge design that uses a moonpool, also referred to as damping pool system, for motion reduction (Leimeister et al., 2018). The Hexafloat is a floating concept developed by Saipem. It is a pendulum lightweight structure composed of a submersible floater made of tubular elements, a counter weight connected to the floater with tendons, simple mooring lines with drag anchors, and a lazy wave dynamic cable (Ribuot, 2019). The TetraSpar floating concept was developed by Stiesdal Offshore Technologies A/S. This concept aims to provide a low-cost FOWT platform that can be easily installed in any condition; hence, contributing to low cost of electricity in comparison to bottom-fixed OWT (Stiesdal, 2021). Depending on the site conditions, the TetraSpar can be configured as a semi-submersible, as a Spar (pendulum configuration), or as a TLP.
The traditional platform concepts (Spar, Semisubmersible and TLP) and the different unique platform design concepts highlighted above are designed using optimization indicators/constraints. Common optimization objectives or problems in an optimization framework are minimizing the cost of the system and the LCOE, improving the performance of the system like the nacelle acceleration, system's dynamic response and fatigue. The objective functions/optimization problem are resolved by specifying constraints to the problem. These constraints are important for enriching the design space, improving computational time and optimization accuracy. Some of the constraints taken into consideration in the design and optimization of a FOWT substructure are: Costs, static pitch angle, dynamic pitch angle and slackness in mooring lines as detailed in Hall et al. (2013). In addition, section 3.3 highlights the definition of constraints in an optimization problem and it also highlights constraints of some works in literature on FOWT.
The three stability classifications described are illustrated in Fig. 2 a, b and c, represents the mooring line stiffness stabilized, the ballast stabilized and the buoyancy/waterplane stabilized platforms respectively. For a detailed mathematical model of the inclining and restoring moment physics, see Borg and Collu (2015).
 Fig. 2. Floating platform classification of OWT, left to right: TLP, Spar and Semi-submersible adapted with permission from (Karimi et al., 2017).
Fig. 2. Floating platform classification of OWT, left to right: TLP, Spar and Semi-submersible adapted with permission from (Karimi et al., 2017).2.2. Design of a FOWT substructure
The design procedure for a FOWT substructure follows the general engineering design process of preliminary/concept design followed by detailed design of the selected concept. Some of the requirements for a successful support structure design are well detailed in DNV-OS-J101 (2013), DNVGL-ST-0119 (2018) and highlighted below:
-
•
Ensure design stability in intact conditions.
-
•
Ensure range of eigenfrequencies of design avoid excitation of resonance by rotor frequencies, first-order wave forces and vortex shedding.
-
•
Maximum offsets or displacements and limits on dynamic motions.
-
•
Ensure safe operation of wind turbine during the design life of the turbine.
-
•
Maintain acceptable safety for personnel and environment.
-
•
Ensure adequate fatigue strength for 20–30 years operation of the system.
2.2.1. Preliminary/concept design
It is an iterative process which begins with concept selection or preliminary design. This is followed by a more detailed design and analysis of the loads and system's response to ensure the structural strength is sufficient to withstand the load effects (DNVGL-ST-0119, 2018).
As discussed in Borg and Collu (2015), Kolja Müller and Simon Tiedemann (2017) and Lefebvre and Collu (2012), the preliminary design of a floating substructure is divided into two stages, which are the preliminary sizing of the support structure's concept, and the design for further development and refinement. The main requirements to fulfil when sizing is the hydrostatic stability requirements which are:
-
•
Support structure must ensure floatability
-
•
A maximum pitch/roll angle of 5° for static equilibrium and 5° combined with ± 15 degrees of dynamic amplitude imposed in order not to substantially compromise the performance of the FOWT (Borg and Collu, 2015). As mentioned in Borg and Collu (2015), this is only a guideline.
-
•
Maximum floater offset or floater excursion in surge including static, first and second order loads is less than 50% of the water depth (Kolja Müller and Simon Tiedemann, 2017).
Other drivers to consider when sizing are the site conditions/metocean data designed for extreme driven ultimate limit state (ULS), turbine weight and inertias and the thrust force on the turbine (Friedemann Borisade et al., 2016).
The preliminary sizing is based on two equations which are the buoyancy force equation detailed in Lefebvre and Collu (2012) and the restoring moment equation detailed in Collu and Borg (2016). The buoyancy force acting on the FOWT system is equivalent to the weight of the turbine and weight of the support structures (tower, platform and mooring lines) while the restoring moment in roll/pitch is a summation of water plane stabilization parameters, ballast stabilization parameters and mooring stiffness discussed in Section 2.1.
An iterative method is used to solve the set of buoyancy force equation and restoring moment equation based on the substructure's geometry to select the concept for detailed design. The iterative method can also be in the form of optimizers to explore the design space based on design objectives like platform's motion response and platform's mass to select the optimal design concept.
2.2.2. Detailed design
For a detailed design assessment, the preliminary design is refined to ensure the structural strength has been improved in intact conditions (Lefebvre and Collu, 2012). Due to the complexity of FOWT as an engineering system, its design must be governed by adequate industry's technical standards and guidelines. The most widely used design standards for FOWTs are Det Norske Veritas (DNV) (DNV-OS-J101, 2013; DNVGL-RP-0286, 2019; DNVGL-SE-0422, 2018; DNVGL-ST-0119, 2018; DNVGL Oslo, 2018; DNVGLAS, 2016), American Bureau for Shipping (ABS) (ABS, 2014, Updated July 2020.), Bureau Veritas (BV) (Veritas, 2010, 2015, Updated, 2019), Class NK (Kyokai, 2012) and the International Electrochemical Commission (IEC) (IEC-61400-1, 2014; IEC-61400-3-2, 2019; IEC-61400-3, 2009). The methodology used for most of the design standards highlighted is the “load and resistance factor design”. The aim of this approach is to obtain design within the adequate safety level by considering safety factors to account for uncertainties in both structural load and structural resistance (Bachynski and Collu, 2019; DNV-OS-C105, 2008). In their work, Collu and Borg (2016) discussed the classifications criteria of the support structures based on existing codes and standards verification societies: BV (Veritas, 2010), ABS (ABS, 2015, Updated March 2018, 2020) and DNV (DNV-OS-J101, 2013).
BV (Veritas, 2010) adopts the classification criterion based on the floating platform's stability mechanisms i.e., ballast stabilized floating platforms (spar-buoy), buoyancy stabilized floating platforms (semi-submersibles and barges), and tensioned stabilized platform classes (TLP).
ABS (ABS, 2015; Updated March 2018; 2020) adopts the classification criterion based on the structural elements of the different floating substructure, without expressly defining the stabilizing mechanism.
For the DNV offshore standard, the criteria are based on whether a structure is restrained (displaced in the order of centimetres) or compliant (displaced in the order of meters or more).
Overview of the analysis approach for detailed design are discussed in Jonkman and Matha (2011) and highlighted below:
-
1.
Develop a model of each complete system with a comprehensive simulation tool capable of modelling the coupled dynamic response of the system from combined wind and wave loading. This form of modelling requires the application of comprehensive aero-hydro-servo-elastic simulation tools that incorporate integrated models of the wind inflow, aerodynamics, hydrodynamics (offshore systems), control (servo) dynamics and structural (elastic) dynamics in the time domain in a coupled nonlinear simulation environment. Some of the available commercial simulation and modelling tools for FOWT system are: DNV suites (Genie, HydroD, Wadam, SIMA), Ansys Aqwa, Nastran, Orcaflex. An important open source simulation and analysis tool is OpenFAST code, developed by (Jonkman, 2007). It enables high fidelity model analysis and verification in the time domain.
-
2.
Verify elements of each full system dynamics model from step 1 by checking its response predictions with responses predicted by a simpler model. When modelling a floating wind turbine, it is advantageous to check the sophisticated nonlinear time domain model against a much simpler linear frequency domain model. This kind of check can be made in terms of response amplitude operators of system motions and loads for excitation by regular waves or in terms of probability distributions of system motions and loads for excitation by irregular waves.
-
3.
Using each full system dynamics model from step 1, a comprehensive loads analysis is performed to identify the ultimate loads and fatigue loads expected over the lifetime of the system. Loads analysis involves running a series of design load cases (DLCs) covering essential design-driving situations, with variations in external conditions and the operational status of the system.
-
4.
Improve each floating system design through design iteration of the above steps, ensuring that each of the system components is suitably sized through limit-state analyses.
2.3. Parameterization techniques in design
The main objective of parametric modelling is to prescribe the properties of a structure (Birk, 2006). This process reverses the flow of traditional structural modelling with interactive CAD systems. Parametric modelling approach starts with specification of the desired form parameters and properties. This is passed to the parametric modelling system for the evaluation of unspecified properties and return of evaluated data to the user with little or no user interference (Birk, 2006). Some shape parameterization techniques from other industries and parameterization work in the offshore wind sector are highlighted below.
2.3.1. Shape parameterization review
Shape parameterization is an important concept in design. It facilitates the exploration of a conceptual design space and provides informed knowledge to make design decisions. Geometric shape parametric modelling cuts across all areas of design and has been widely researched in the aerospace, automotive, construction, architecture, manufacturing and civil engineering sectors.
Shape parameterization techniques review has been extensively done for aerospace geometric designs and are detailed in the works of Samareh (1999), Samareh (2001) and Kulfan and Bussoletti (2006). For offshore hydrodynamic models, the application of shape parameterization techniques for design, analysis and optimization can be seen in works done by (Birk and Clauss (2002), Birk et al. (2004) and Birk and Clauss (2008)). These techniques are the reviewed techniques from the aerospace sector and are highlighted in this section. Properties of a well conducted parameterization method as discussed in the works of Kulfan and Bussoletti (2006), Samareh (2001) and Zhu (2014)are:
-
1.
Provide high flexibility to cover the potential solution in the design space;
-
2.
Give as small number of design variable as possible;
-
3.
Produce smoothness and reliability of geometric shapes;
-
4.
Provide correct design parameters for geometric and physical understanding in design space exploration by the engineers.
An overview of some of the shape parameterization techniques are highlighted in Section 2.3.1.1 to 2.3.1.3.
2.3.1.1. Free form deformation (FFD)
FFD dates back to the mid nineteen eighties. Algorithms for morphing images and deforming objects are quite common in the field of soft object animation (SOA) in computer graphics (Jamshid, 1999; Sederberg and Parry, 1986). SOA algorithm can serve as the basis for an efficient FFD shape parameterization technique. These algorithms (SOA) are powerful tools for modifying shapes as they use high-level shape deformation rather than manipulating lower geometric entities (Jamshid, 1999). The SOA algorithms treat the model as rubber that can be twisted, bent, tapered, compressed, or expanded, while retaining its topology (Samareh, 2001). The SOA algorithms relate the grid-point coordinates of an analysis model to a number of design variables (Jamshid, 1999; Samareh, 2001). Coppedé et al. (2018) proposed a new approach for hull shape modification. Their proposal is based on a combination of the Subdivision Surface technique for hull surface modelling and FFD algorithm for shape variation. In their work, a transformation made of two FFDs on a fast ferry was analysed with respect to both local and global relevant geometric parameters. The results and the quality of the modified surfaces prove that the proposed combined SS-FFD approach can be applied for further specific design and variation studies like an automatic ship design by optimization process, where reduction of number of parameters is a key feature for faster convergence.
2.3.1.2. CAD-based approach
The use of commercial CAD systems for geometry modelling can potentially save development time for a multidisciplinary design optimization application; however, parameterizing an existing CAD model is still a challenging task as the models created can be deficient for automatic grid generation tools (Townsend et al., 1998). The use of feature-based solid modelling (FBSM) capable of creating dimension-driven objects in today's CAD system coupled with the geometry modelling allows designers to work in three-dimensional space while using topologically complete geometry that can be modified from the dimensions of the features from which it was created (Jamshid, 1999; Samareh, 2001).
Although the use of parametric modeling in design would make the FBSM tools ideal for optimization, existing FBSM tools are not capable of calculating sensitivity derivatives analytically (Samareh, 2001). Issues involved with the use of a CAD system for an MDO application are discussed in Townsend et al. (1998)(Townsend et al., 1998). Some of the issues identified are: allowing for replacement of the CAD system when required, and determining the analytical sensitivity derivatives required by a gradient-based optimizer.
Due to the large computer codes for commercial CAD systems, to differentiate the entire system with automatic differentiation tools may be very challenging, hence, the calculation of the analytical sensitivity derivatives of geometry with respect to the design variables could prove to be challenging within a commercial CAD environment (Townsend et al., 1998). For some limited cases, the analytical shape sensitivity derivatives can be calculated based on a CAD model (Jamshid, 1999; Samareh, 2001); however, this method will not work under all circumstances. One difficulty is that, for some perturbation of some dimensions, the topology of the CAD part may be changed. To control the dimension and topology effectively requires the use of polynomials and splines.
2.3.1.3. Polynomials and spline techniques
Polynomial and splines have been vastly used in engineering design, from the aerospace and automobile sectors to naval architecture, as most CAD modelling are based on splines. The number of variables needed to generate a smooth shape can be greatly reduced by using a polynomial or spline representation (Samareh, 2001). Polynomials also have the capability of describing a curve in a compact form with a reduced set of design variables. It can be expressed in its standard power basis form shown in Eq. (1).(1)Where is the coefficient vectors corresponding to three-dimensional coordinates in which their vector components can serve as design variables; is geometry sensitivity derivative with respect to and . In this representation, the coefficient of vectors provides little geometric information about the shape of the curve. This polynomial representation in the power basis form is prone to round-off error when there is a large variation in the magnitude of coefficients (Straathof, 2012). It is difficult to predict how a change in the coefficient vector will influence the overall shape of the polynomial curve.
An improved representation of a polynomial curve is done through the Bezier representation highlighted in Eq. (2).(2)Where n is the number of control points, is the degree p Bernstein polynomials, the coefficients are control points also utilized as design variables. The Bezier form is a much improved representation of curves than the power basis (Farin, 1993b). Although, the Bezier form and the power basis are mathematically equivalent, the computation of Bernstein polynomials which is a recursive algorithm (de Casteljau algorithm) minimizes the round off error in the Bezier curve (Farin, 1993a; Samareh, 2001). In a Bezier curve, the control points approximate the curve as the convex hull of the Bezier control polygoncontains the curve. The first and last control points in a Bezier curve are located at the beginning and the end of the curve respectively. The Bezier curve is a suitable representation for shape optimization and parameterization of simple curves.
Complex curves however, requires a high degree Bezier form and as the degree of a Bezier curve increases, so does the roundoff error (Samareh, 2001). In addition, computing a high degree Bezier curve is computationally expensive and inefficient. As described in Samareh (2001), several low-degree Bezier segments can be used to represent a complex curve rather than using a high degree Bezier curve. The resulting composite curve is a spline more accurately referred to as B-spline. A multisegmented B-spline is described in Eq. (3).(3)Where are the B-spline control points, p is the degree, is the I th B-spline basis function of degree p. In comparison to the Bezier representation, the low degree B-spline form can represent complex curves more efficiently and accurately. In Eq. (2), the Bernstein polynomials is replaced by a set of B-spline basis functions and the Bernstein coefficient vector replaced by a B-spline control polygon . A disadvantage of a regular B-spline representation is that it doesn't have the capability to represent implicit conic sections accurately. A different type of B-spline with the capability of rectifying this deficiency is Non Uniform Rational B-spline (NURBS) (Farin, 1990). NURBS can represent most parametric implicit curves without loss of accuracy (Farin, 1990; Samareh, 2001). A NURBS curve is defined as highlighted in Eq. (4).(4)Where are the control points, are the weights and is the ith B-spline basis function of degree p. A similarity between Basis, Bezier, regular B-spline and NURBS representation of curves is that the sensitivity derivatives with respect to the control points are fixed during optimization cycles. However, in a NURBS scenario, if the weights are selected as design variables, the sensitivity derivatives will be functions of the weight design variables (Samareh, 2001).
2.3.2. Parameterization work on FOWT
Efficient evaluation of a large number of FOWT designs require adequate parameterization, which can enable the exploration of a rich design space limiting the number of design variables. The design parameterization should ideally cut across more floating platform classes and different geometrical variables for optimization purposes. A detailed parametric study of a FOWT system is presented in (Tracy, 2007), where the optimization leads to the definition of the Pareto fronts for mean square acceleration of the turbine against multiple cost drivers of the offshore structure (simply put – a trade-off between performance and cost). The cost drivers include displacement of the structure and total mooring line tension.
Another work on FOWT parameterization and optimization can be traced to Sclavounos et al. (2008). In this work, they presented a coupled dynamic analysis of floating wind turbines incorporating a parametric design study of floating wind turbine concepts and mooring system. They presented a Pareto optimal design that has a favourable combination of nacelle acceleration, mooring system tension, and displacement of the floating substructure supporting a 5 MW wind turbine. Their results show that, for a fully coupled dynamic analysis conducted for the wind turbine, the floating substructure and the mooring system, considering both wind and sea state environmental conditions, the Pareto optimal structures are generally either a narrow deep drafted spar or a shallow barge ballasted with concrete. The varying parameters for this work are the draft and the diameter of the platform.
It can be observed from the examples provided that the parametric approach is mainly varying platform diameter and draft. To apply geometric shape parameterization technique, there is need to look at other offshore sectors like the oil and gas and maritime sectors. In their study, Zhang et al. (2008), noted that a successful hydrodynamic optimization of ship hull depends on the geometric variation of hull planer forms. The parametric design of hull forms involves; specifying form parameters, design of a set of longitudinal curves, parametric modelling of sections which forms the body parts and generating hull forms (Zhang et al., 2008). This curve parameterization technique has been successfully used in the design of ship hulls, and can be implemented in the design of FOWT platforms. Another parameterization and optimization work, carried out for oil & gas offshore structures, with an optimization methodology based on linear analysis of wave-body interaction, has been done by Birk and Clauss (2008). This work was started over a decade earlier as hydrodynamic shape optimization of large offshore structures by the same authors (Clauss and Birk, 1996). In Birk and Clauss (2008), a reliable hydrodynamic analysis, using the WAMIT program, has been integrated with a newly developed parametric hull design methodology, which enables the automated generation of hull shapes, without the need for user interaction. The optimization algorithm is used to optimize the shapes with the hull responses. The shape parameterization technique discussed in Section 2.3.1 can be employed in the design, analysis, and optimization of FOWT platforms.
2.4. Dynamic analysis techniques
Two ways for analysing a FOWT model is to conduct the analysis in the frequency or the time domain, to access the dynamic response of the structure. These approaches help estimate the response to wind and wave forces which impose oscillatory motions on the FOWT system.
2.4.1. Frequency domain approach
The frequency domain approach has been extensively used in the oil and gas industry, as it enables the assessment of the system's wave response spectrum given the wave spectrum of the site and the response amplitude operator (RAO) of the given system (Journée and Massie, 2001; Patel, 2013). For a FOWT system in regular wave, the resultant system of equations of motion, in the frequency domain is highlighted in Coraddu et al. (2020) and Newman (2018).
The formulation for the radiation and diffraction boundary value problem and the resulting hydrodynamic added mass, damping matrices and wave-excitation force depend on frequency, water depth, and sea current, as well as on the geometric shape of the support platform, its proximity to the free surface, and its forward speed. Additionally, the wave-excitation force depends on the heading direction of the incident waves (Jonkman, 2007). The frequency dependence of the hydrodynamic added mass and damping matrices is of a different nature to that of the wave-excitation force. In the frequency dependence of the hydrodynamic added mass and damping matrices, the matrices depend on the oscillation frequency of the particular mode of support platform motion. However, the frequency dependence of the wave-excitation force means that the force depends on the frequency of the incident wave. Both set of frequencies (added mass and damping frequency and wave excitationfrequency) are identical because the platform is assumed to oscillate at the same frequency as the incident wave.
By definition, the frequency-domain model assumes that the platform motions are at the same frequency as the incident waves and that the incident waves are regular. While this means that the transient response of the system cannot be modelled, the assumption of linearity implies that the responses at different wave frequencies can be superimposed according to a wave spectrum to predict the system behaviour in irregular sea states (Hall et al., 2013). Extensive discussion of these hydrodynamic coefficients can be found in Anaya-Lara et al. (2018) and Journée and Massie (2001). The hydrodynamic coefficients (added mass. radiation damping and first order wave excitation) can be approximated as solution to the linear radiation-diffraction problem using the boundary element method. This is implemented in softwares like WAMIT, detailed in WAMIT-Inc (2020) and WADAM in DNVGL Høvik (2019).
The complex magnitude of the response transfer function between the amplitude of the wave and the amplitude of oscillation in the oscillatory degree of freedom is the RAO highlighted in Eq. (5).(5)Where is the frequency of oscillation of the platform, is the total system mass matrix, is the hydrodynamic added mass coefficient, is the radiation damping coefficient without the consideration of viscous forces and is the sum of the hydrostatic and mooring stiffness coefficients. and is the first order wave excitation load transfer function (Coraddu et al., 2020; Newman, 2018).
The wave response spectrum should be minimized in order to minimize the displacements and accelerations of the FOWT system. It is important that the natural frequencies (periods) of the FOWT system should be outside the most energetic frequency (period) range of the wave spectrum (Collu and Borg, 2016). This depends on the location, but in general wave spectra are most energetic between the 5s and 25s period (1.25–0.25 rad/s), and therefore the structure should aim at having natural periods above 25s or below 5s in all the DOFs (Collu and Borg, 2016).
The frequency domain analysis approach is mostly used for preliminary design of FOWTs as the RAO concept is strictly valid to estimate the regime response to waves and by definition is a linear approach (Collu and Borg, 2016). To capture the transient behaviour of a FOWT due to non-linear loading from wind and irregular seastate, a more detailed approach is required as in the time domain approach.