1. Introduction
1.1. Motivation
In Norway, production and export of salmon are key contributions to the economy and within the aquaculture production feeding represents currently the single most important cost factor. Optimizing the feeding is therefore of high commercial interest and requires a deeper understanding of the feeding process itself.
Within this paper we describe an automated method for estimating the spatial feed pellet distribution that results from rotor spreaders that are commonly employed in salmon fish cages. The aim of this study is to evaluate the effectivity of an experimental setup for measuring the pellet-distribution with an unmanned aerial vehicle (UAV) based camera system at a full scale fish farm. Basic image analysis is used to estimate the count of pellet droppings on the water surface.
1.1.1. Optimizing feeding
Optimal feeding aims to reach a maximum growth of the fish. Therefore, optimal feeding is characterized by the fact that all hungry fish are fed and that simultaneously a maximum of the feed is consumed by the fish, thereby minimizing feed pellet loss. Failing to do so might result in one or several of the following issues; underfeeding, reduced growth, increased stress due to increased competition among fish, a larger size variation and nutrient discharge to the environment (Einen et al., 1995, Kadri et al., 1996, Noble et al., 2008, Talbot, 1993, Talbot et al., 1999) all leading to economic losses for the fish farmers. Reduced fish welfare is also directly linked to reduced feed intake and growth (Attia et al., 2012, López-Olmeda et al., 2012). Thus, when feeding large populations of fish in sea cages, it is anticipated that spreading the feed pellets uniformly and over a large area is beneficial (Attia et al., 2012, Juell, 1995, Kadri et al., 1996, Metcalfe and Thorpe, 1992, Olla et al., 1992, Thomassen and Lekang, 1993). The underlying thought is that the feed pellets should be delivered in a way such that the fish can find and eat the pellets, at a rate adapted to the appetite of the fish (Talbot et al., 1999). Currently the main uncertainty related to the feeding process is associated to the uniformity of the surface coverage of feed pellets distributed with currently used rotor spreaders.
1.1.2. Commercial background
Farmed production of Atlantic salmon (Salmo salar) has increased from 297 to over 2.3 million tonnes globally from 1970 to 2014 (FAO, 2015) and continues to follow this trend. In 2016, the Norwegian aquaculture industry produced Atlantic salmon and rainbow trout at 978 sea based sites with a total product value of 6.7 billion EUR (Sandberg and Steinseide, 2017). The cost of feed represents about 50% of all expenses (Winther et al., 2011) and 1.6 million tonnes of feed were administered at Norwegian salmon and trout farms in 2016.
At a feed price of about 1.2 EUR/kg in 2016 (Norwegian Directorate of Fisheries, 2013) this corresponds to a total value of about 2 billion EUR. While in the sea, the cage fish is fed a diet mainly consisting of a mixture of soy protein concentrate, rapeseed oil, fish meal, fish oil and wheat starch (Ytrestøyl et al., 2014) in the form of a 3-12 mm diameter pellet adapted to the current size of the fish.
1.2. Related work
Some models have been developed previously to describe the pellet distribution from a rotor spreader on the surface and in the water along with the simulation of fish behaviour and feeding in salmon cages (Alver et al., 2004, Alver et al., 2016, Føre et al., 2009). In order to provide input to such models, experiments have been conducted to investigate the spreading by counting pellets landing in two rows of Styrofoam boxes on the water surface. The results showed that the distribution was annular (ring-shaped), often skewed to one side, and covered a limited percentage of the sea cage surface area (Oehme et al., 2012). The Styrofoam box method is simple, but it conceptually covers only a small portion of the surface area, requires weighting or photographing and counting. In addition the boxes are difficult to put and hold into position within a real sea cage. Therefore, there is a need for alternative methods which are simpler, faster and which can be applied to a wide selection of spreader designs including future spreaders that may allow for a more targeted spreading of the pellets.
The solution we investigate in this paper exploits the automated analysis of videos recorded by an UAV. An experiment also using an UAV was performed by Skøien et al. (2016a), however their manual counting analysis was restricted to a small cross section emulating the area previously covered by Styrofoam boxes. Note that compared to the Styrofoam box method, which only cover limited segments, the method presented from this study can cover the entire water surface. However, the challenges lie in identifying pellets over a large area with varying lighting conditions from a single camera footage. In order to cope with different lighting conditions one often needs to employ thresholding techniques without introducing a user based bias. Many of these techniques are surveyed within (Sezgin and Sankur, 2004). Morphological filters (Soille, 2003) represent another important class of filters for Image Analysis and are often exploited for the extraction of “countable” objects in images. A broader overview into low-level computer vision (including feature detection and segmentation) which is useful for counting in images can be found in Szeliski (2010). To verify the method, the results are compared with a reference measurement obtained using the previous Styrofoam box method.
2. Materials and methods
2.1. Experimental setup
The experiment was conducted in the time period from the 4th to the 6th of August 2015 at the fish farming location Korsneset in the Halsa municipal in central Norway.
2.1.1. Cage and site-location
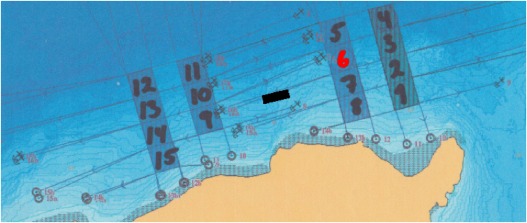
The fish farm has geographic coordinates 63°8′46,7″N, 8°13′17.5″E and a detailed map of this site is illustrated in Fig. 1. It is administered from a barge which is moored between cage nine and seven (Fig. 1). A circular High Density Polyethylene (HDPE) cage at the position labeled with number six (cf. Fig. 1) was used throughout the experiment. The circumference of the cage was 157 m, which is a typical size of Norwegian sea cages (Oppedal et al., 2011). No fish netwas mounted to the cage and no fish was present during the duration of the experiment. A circular bird net frame (known as hamster wheel) with a circumference of 72 m was placed in the center of the cage (Fig. 2).
 Fig. 1. Overview of the site. The fish farming site Korsneset with cage number indications. The experiment was conducted at cage 6. The position of the feed barge is indicated between cage 9 and 7.
Fig. 1. Overview of the site. The fish farming site Korsneset with cage number indications. The experiment was conducted at cage 6. The position of the feed barge is indicated between cage 9 and 7. Fig. 2. The experiment cage, i.e. the floating collar along with the centeredcircular bird net frame (hamster wheel) is shown in the foreground. Also the feed barge can be seen in the background (top-left corner), as well as the white feed pipe running between the barge and the cage.
Fig. 2. The experiment cage, i.e. the floating collar along with the centeredcircular bird net frame (hamster wheel) is shown in the foreground. Also the feed barge can be seen in the background (top-left corner), as well as the white feed pipe running between the barge and the cage.2.1.2. Feed distribution system
The feed barge contains an array of silos holding feed pellets which may be of different size and ingredient compositions. The particular pellet type used for all the experiments was a 9mm Optiline S L 2500-50A (Skretting, Stavanger, Norway). The pellet transport from the barge to the sea cage is performed pneumatically using blowers (Omega CB131 C, Kaeser Compressors, Inc., Fredericksburg, VA, USA) which are able to move 10.85 m3/min of air at up to 1 bar pressure difference. The feed pellets are transported through a high-density polyethylene (HDPE) pipe with an outer diameter of 90 mm and a wall thickness of 7 mm. The pipe length measured 317 m from the selector valve on the barge to the rotor spreader. The feed pipe was tied to the floating collar in such a way that the pipe was as straight as possible from the edge of the hamster wheel towards the centre of the cage, where the rotor spreader was moored. The feed pipe terminates in a rotor spreader (cf. next Section 2.1.3), centrally placed, which spreads the pellets across the water surface. Both the pellet throw and the rotation of the spreader are driven by the same airflow, and the latter arises due to the spiral shape of the outlet pipe. This design is popular among fish farms and is often used due to its simplicity, low cost and low maintenance. Variants of this spreader type can be found across the world.
2.1.3. Rotor spreaders used in the experiment
The particular rotor spreaders we used within our case study were the AKVA Group “CF90 Double” and the AKVA Group “Hex Base”. Both spreaders are commonly used in sea based salmon aquaculture (Skøien et al., 2015) and consist of a 90° bent steel pipe, where the lower end is connected to the feed pipe, and the upper part is connected to a bearing. The bearing allows the upper lightweight aluminium pipe (center pipe) to rotate, spreading the feed pellets in an annular pattern (Oehme et al., 2012). At the end of the center pipe there is also an adjustable spout allowing for an alteration of the pellet trajectory. Both spreaders were tested with an aluminium center pipe with a bend radius of 600 mm, in our experiments referred to as C600 for the “CF90 Double” and H600 for the “Hex Base”. The “Hex Base” spreader was additionally tested with a center pipe with a bend radius of 450 mm, to which we refer to as H450. The three used spreader instances are shown in Fig. 3.
 Fig. 3. Rotor spreaders used in the experiment. From left to right: CF90 Double with 600 mm bend radius center pipe (C600), Hex Base with 600 mm bend radius center pipe (H600), Hex Base with 450 mm bend radius center pipe (H450) (illustrations by courtesy of AKVA Group AS).
Fig. 3. Rotor spreaders used in the experiment. From left to right: CF90 Double with 600 mm bend radius center pipe (C600), Hex Base with 600 mm bend radius center pipe (H600), Hex Base with 450 mm bend radius center pipe (H450) (illustrations by courtesy of AKVA Group AS).All used spreader pipe outlets have an upwards angle of 15° with respect to the horizon. The spreader design differs in that the “CF90 Double” is kept floating by a buoy attached directly below the bearing on a shaft, and a counterweight at the bottom end of the shaft is maintaining the spreader in an upright position thereby counteracting the roll and pitch of the spreader, whereas the bearing of the “Hex Base” spreader is supported by three equally spaced HDPE support beams attached to a hexagonal floating frame that consists also of HDPE pipes arranged in a hexagonal shape thereby maintaining the stability of this spreader type.
2.2. Data acquisition
In order to record the pellets that drop with a splash into the water, we used a UAV to record aerial videos from a top-view position of the hamster wheel in the fish cage. For comparison, we performed a manual reference measurement during one of the experiments by placing and arranging Styrofoam boxes in a cross-formation onto the water surface. Both the UAV recordings and manual Styrofoam box sampling are described below in more detail.
2.2.1. Aerial image capture details
The image sequences were captured using an Unmanned Aerial Vehicle (UAV), Dji Inspire 1 UAV (Shenzhen, China). The UAV was positioned directly above the rotor spreader at a height of 25.85 m. The UAV carried a 4 K camera with 94° FOV, a lens with 9 elements in 9 groups, and a 1/2.3 inch CMOS sensor in a 3-axis stabilization gimbal. The images were shot at 25 FPS with an image resolution of 4096 × 2160 pixels. The camera was calibrated using a 7 × 9 (A4) checker-board calibration pattern. The gimbal was set to point the camera straight down, perpendicular to the water surface. It is assumed that this camera orientation was maintained throughout the experiment, hence avoiding the need to compensate for the roll and pitch of the UAV.
2.2.2. Styrofoam box sampling
For comparison, during the C600 spreader experiment, we also sampled the pellet distribution using Styrofoam boxes (Bewi AirBOX). The size of a single Styrofoam box was 0.4 m × 0.8 m and the boxes were mounted in four radial arrays with a separation angle of approximately 90°. Each row consisted of 26 boxes connected on the long edge by plastic clamps. The first row was aligned along the feed pipe. Fig. 4 shows a top-view of the hamster wheel containing the rows of the Styrofoam boxes. Note that no pellets were observed to land outside of the hamster wheel and the Styrofoam boxes were therefore placed only in the inner part of the hamster wheel covering the radius from the rotor spreader to the inner edge of the frame. Each box was marked with a unique ID number in the bottom for a later identification within the images.
 Fig. 4. Overhead footage taken from the UAV. The rotary spreader is located in the centre of the image with the feed pipe entering from the top. Four rows of Styrofoam boxes are visible, with the two vertical rows running along the direction of the feed pipe, and the two horizontal rows running perpendicular to the direction of the feed pipe.
Fig. 4. Overhead footage taken from the UAV. The rotary spreader is located in the centre of the image with the feed pipe entering from the top. Four rows of Styrofoam boxes are visible, with the two vertical rows running along the direction of the feed pipe, and the two horizontal rows running perpendicular to the direction of the feed pipe.2.3. Experiments
The actual experiments were performed in batches for the three rotor spreader configurations i.e. C600, H600 and H450 (cf. Section 2.1.3). Note that the Styrofoam boxes were only used during experiments with the C600 rotor spreader. Before running the H600 and H450 experiments, the boxes were removed. A single spreader experiment started with a pure airflow of about 20 s before the feed pellets were released from the silo into the feed pipe. This ensured that the spreader rotation speed was already stable enough to prevent data skew caused by slow airspeed at the beginning of tests. The UAV captured aerial images during the entire feed batch delivery, and docked on the research support vessel in-between experiments. After each batch for the C600 experiments the content of every Styrofoam box was photographed for later counting of pellets and emptied before the start of the next batch. Two different airflow speeds were used in the experiments; 16 m s-1 and 20 m s-1. Three replicate experiments were run for each air speed. Each consisted of one batch of feed pellets delivered at 20 kg/min for 1 min. Wind speed and direction was also recorded during each test using a 7N1 V10 anemometer (TFA, Dostmann GmbH & Co. KG, Wertheim, Germany).
The mean pellet speed through the feed pipe was measured by taking the time from the first pellets entering the feed pipe, to their exit at the rotor spreader.
2.4. Data analysis
2.4.1. Reference coordinate system and virtual box segments
For the evaluation and comparison of the experiments we introduced a reference coordinate system that has its origin in the center of the spreader, the positive x-axis goes along the feed pipe – away from the spreader – and the z-axis is pointing down towards the sea (compare (Skøien et al., 2015, Skøien et al., 2016b)). For image processing analysis and pellet density illustration, the water surface was divided into 800 virtual sectors: 25 divisions in the radial direction and 32 in the circumferential direction (Fig. 5). For comparison with the Styrofoam box measurements, we also defined two perpendicular virtual box arrays with 26 box segments of rectangular shape that emulated the Styrofoam boxes with a size of 0.4 m × 0.8 m.
 Fig. 5. The origin of the coordinate system introduced for reference was placed at the center of the spreader, positive x-axis along the feed pipe (orange) away from the spreader, and z-axis pointing towards the sea. The water surface was divided into 800 sectors (violet), 25 in the radial direction – corresponding to the width of the Styrofoam boxes (white) – and 32 in the circumferential direction. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
Fig. 5. The origin of the coordinate system introduced for reference was placed at the center of the spreader, positive x-axis along the feed pipe (orange) away from the spreader, and z-axis pointing towards the sea. The water surface was divided into 800 sectors (violet), 25 in the radial direction – corresponding to the width of the Styrofoam boxes (white) – and 32 in the circumferential direction. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)2.4.2. Styrofoam box pellet count
We counted the pellets in the Styrofoam boxes semi-automatically from the photos taken during the experiment using the open source image analysis software OpenCFU (Geissmann, 2013). A 4-point convex polygon region of interest – enclosing the visible bottom of the box – had to be defined to avoid pellet counting from adjacent boxes. No image pre-processing like noise-filtering was necessary and standard local thresholding (with a radius of 15 to 20 pixels) led already to a robust identification and counting of separated individual pellets. However, a manual count correction was necessary for pellet clusters that appeared when several pellets gathered tighter together (see. Fig. 6).
 Fig. 6. OpenCFU was used to semi-automatically count the pellets in the images of the Styrofoam boxes. Pellet clusters required a manual correction of the count.
Fig. 6. OpenCFU was used to semi-automatically count the pellets in the images of the Styrofoam boxes. Pellet clusters required a manual correction of the count.2.4.3. Image processing
The aim of the image sequence analysis of the aerial videos from the UAV-camera is to determine the spatial pellet distribution based on the visible splashes that appear when the pellets hit the water-surface. An assumption we make is that the splash-activity is proportional to the number of pellets that hit the surface. Single pellets create usually a countable splash that is visible for a few frames, however pellet-clusters result in larger not-countable areas of splash-activity and the splash surface area is taken as indicator for the amount of involved pellets. The different weather conditions lead to largely varying reflections on the water surface and the main image processing based challenges arise due to these different and often quickly changing lighting conditions. Fig. 7 shows the top-view images from the 3 different experiments. The first left image shows an image during a C600 experiment and due to a gray cloudy day the water surface appears uniformly gray. Compared to the weather conditions during the other two experiments (brighter days with some clouds) this represented the best and therefore preferred condition for an automatic detection of the pellet splashes.