1. Introduction
By volume, global shipping currently exceeds 80 percent of world merchandise trade (UN, 2020). Embracing technological advances, the shipping sector is increasingly preparing for the deployment of maritime autonomous surface ships (MASS). These developments have been further motivated by the vulnerabilities in global supply chains becoming evident during the 2019 pandemic, with labor shortages and extensive lockdowns disrupting international trade. Already a billion-dollar industry, the autonomous ships market is expected to achieve significant growth in the coming years (Jadhav and Mutreja, 2020). In addition to reducing costs and making global supply chains robust against labor shortages and external shocks, MASSs may enhance off-shore safety by eliminating accidents caused by human error and eliminating the need for human operators in harsh sea environments (de Vos et al., 2021), although others have argued that the extent to which this is the case is more uncertain (Wróbel et al., 2017). Furthermore, it is believed that the introduction of MASS may lead to a reduction of greenhouse gas emissions and improved port efficiency through slow-steaming and improved route planning (Porathe et al., 2015b).
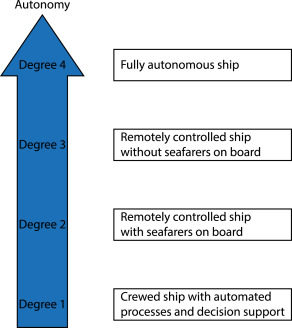
Enabling increased automation in maritime shipping has been an ongoing effort for several years, with the International Maritime Organization (IMO) guiding the development of MASS through collaboration with regulators, industry, and researchers (IMO, 2021). The IMO has defined four degrees of autonomy, as seen in Fig. 1. In the first two degrees, seafarers are on board the ship with varying degrees of automation. In degree three autonomy, the MASS is controlled from another location, e.g., a shore control center or another vessel, without seafarers on board, while in degree four autonomy, the MASS can operate and solve complex problems autonomously without human monitoring (IMO, 2021). However, significant challenges remain before MASSs are ready for fully autonomous operations. One of these important challenges lies in developing secure collision avoidance systems capable of safely navigating waters with other autonomous and conventional vessels present while complying with the rules of the road at sea, the Convention on the International Regulations for Preventing Collisions at Sea (COLREGs).
As shown by Vagale et al. (2021), the development of collision avoidance algorithms that are, at least partially, COLREGs-compliant has been on-going for several years. Recently, Woerner (2016) made great contributions by addressing the importance of complying with COLREGs while exhibiting human-like behavior and also considering non-compliant actors. Johansen et al. (2016) used mathematical interpretations of COLREGs rules to formulate the problem of obtaining a protocol-compliant collision-free trajectory in the context of Model Predictive Control (MPC). Field demonstrations of MPC-based collision avoidance algorithms were later demonstrated by Eriksen et al. (2019)and Kufoalor et al. (2020). However, as pointed out by Burmeister and Constapel (2021), most of the proposed algorithms assume access to more or less perfect information. Furthermore, information obtained through communication beyond the Automatic Identification System (AIS) is rarely leveraged.
The observation that collision avoidance algorithms in the maritime domain have been confined to self-contained algorithms, with little emphasis on collaboration and data exchange, is in stark contrast to collision avoidance algorithms developed for ground and air vehicles. In fact, for aerial vehicles, vehicle-to-vehicle (V2V) communication has been identified as crucial for collision avoidance purposes (Chakrabarty et al., 2019). As such, an important question that should be addressed is whether increased use of communication, and the addition of collaborative elements, may enhance collision avoidance algorithms for ocean-going ships.
 Fig. 1. The degrees of autonomy according to a recent regulatory scoping exercise by the International Maritime Organization (IMO, 2021).
Fig. 1. The degrees of autonomy according to a recent regulatory scoping exercise by the International Maritime Organization (IMO, 2021).1.1. Contributions
To address this topic, we start by reviewing the role of communication between conventional ships today and investigate how information exchange is used for collision avoidance purposes. Furthermore, we review current and future technologies that can facilitate the collaboration of vessels. In particular, we look at concepts developed through e-navigation projects, which demonstrate a growing interest in using information exchange between conventional ships. We proceed by carefully investigating and finding gaps in previously proposed collaborative collision avoidance algorithms in the maritime domain. In particular, we consider important cybersecurity aspects that have not previously been addressed by collaborative algorithms in the maritime domain. We also consider the role of shore centers and discuss to what extent collaborative collision avoidance algorithms should use a centralized or decentralized approach. Finally, we draft an outline of what a future collaborative collision avoidance algorithm may look like. As such, this paper distinguishes itself from previous reviews, e.g. (Chen et al., 2020), on maritime collision avoidance algorithms by considering and highlighting the importance of collaboration between the involved vessels and is the first comprehensive review on the topic.
1.2. Research methodology
The scope of the article contains maritime communication technologies, e-navigation projects, and collision avoidance studies that can facilitate the collaboration of vessels. The articles related to communication technologies and e-navigation projects are identified from the authors’ previous readings. For collaborative collision avoidance algorithms, a systematic literature review is conducted. Table 1 defines the review protocol of our study. We excluded multiple ship formation studies and focused on collaborative collision avoidance studies containing active information exchange of the vessels. After filtering, we screened the remaining studies by their abstracts and manuscripts if needed. The studies related to e-navigation and communication are categorized as supplementary articles, and collision avoidance algorithms are reviewed further in detail. Additionally, we included some articles which are not in the search results but identified from reference lists. We recorded the systematic literature review process using the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) method (Page et al., 2021). The total number of articles and review process is presented in Fig. 2.
1.3. Outline
The remainder of the paper is structured as follows. Section 2 introduces terminology, COLREGs, current and future communication technologies that can contribute to collaboration, and e-navigation projects. In Section 3, we investigate how previous studies have approached collaborative and cooperative collision avoidance in the maritime domain. We proceed by comparing existing maritime collaborative collision avoidance studies in Section 4 in terms of communication architecture, compliance with COLREGs, MASS-conventional ship interaction, the inclusion of non-cooperative ships, assumption of frequent and reliable information exchange in problem-solving, and security problems that may occur during collaborative communication. Then, in Section 5, we provide high-level suggestions for future directions in maritime collaborative collision avoidance. Finally, we summarize the most significant findings in Section 6.
Table 1. Systematic literature review protocol.
| Subject | Description |
|---|---|
| Database | Web of Science |
| Search strategy | (“collision avoidance” OR “path planning” OR navigation) AND (cooperation OR collaboration OR coordination OR intention OR negotiation) AND (autonomous OR ship OR vessel OR unmanned OR marine) |
| Exclusion criteria | Air, Ground, Underwater, Space, Formation, Biology/Medicine |
| Publication type | Journal and conference papers |
| Time interval | 2000 - January 2022 |
 Fig. 2. Systematic literature review of collaborative collision avoidance presented with PRISMA 2020 flow diagram (Page et al., 2021).
Fig. 2. Systematic literature review of collaborative collision avoidance presented with PRISMA 2020 flow diagram (Page et al., 2021).2. Background
The maritime environment is complex and consists of actors communicating over different communication channels, as seen in Fig. 3. Here, the land station might represent a shore control center or Vessel Traffic Services (VTS). Furthermore, aids to navigation (AtoN) stations, which can assist vessels and crews by providing information about local navigational hazards, are included.
While these actors share information, the information, except for that obtained by AIS, is rarely used by collision avoidance algorithms. Instead, collision avoidance algorithms usually limit themselves to local information obtained through onboard sensors such as radar. We are, therefore, interested in whether collision avoidance algorithms can be improved in terms of navigational safety by actively using communication and the information exchanged to a greater extent than today.
 Fig. 3. An overview of relevant actors in the maritime environment, including Maritime Autonomous Surface Ships (MASSs) and Aids to Navigation (AtoN).
Fig. 3. An overview of relevant actors in the maritime environment, including Maritime Autonomous Surface Ships (MASSs) and Aids to Navigation (AtoN).2.1. Terminology
The collaboration of MASSs and human operators, both navigators and VTS operators, can be viewed as an example of human–robot collaboration, which is a field that combines robotics, artificial intelligence, cognitive sciences, and psychology. We observe that the terms collaboration, cooperation, coordination, intention exchange, and trajectory negotiation are used interchangeably in previous studies. Therefore, we believe it will be helpful to reach a common terminology once the meanings of the terms have been clarified.
Hord (1981) states that the main difference between collaboration and cooperation is that collaboration maintains a clear, shared goal for all agents, whereas, in cooperation, the ultimate goal can be different for each agent. Consequently, when agents are cooperating, the activities of the agents are agreed upon and coordinated, but the agents may have different objectives. When agents collaborate, the activities of the agents are agreed upon and coordinated with a common goal in mind. In this context, the sharing of intent and negotiation of trajectories can be perceived as tools that help facilitate coordination for cooperation and collaboration.
With these definitions in mind, the term ‘cooperation’ can be used to describe the interaction between ships in a collision avoidance scenario if we define the individual goal of each ship as reaching its next waypoint. However, a more common problem description used in collision avoidance is that of producing velocity vectors resulting in collision-free trajectories, a goal shared by all agents. Consequently, we find that the term ‘collaboration’ is more suitable when describing these collision avoidance algorithms.
2.2. COLREGs
The rules of the road at sea are determined by the COLREGs, defined by the IMO (1972). Consisting of 38 rules, the goal of the COLREGs is to prevent collisions at sea. Importantly, the COLREGs rules are vague, and intentionally formulated such that experienced mariners can leverage their experience and situational awareness to make sound judgments. This makes the COLREGs very different from air traffic rules and the rules of the road.
With MASSs gaining traction in commercial shipping and public transportation, the development of collision avoidance algorithms has gained increased attention. We can sort collision avoidance algorithms into two categories; those who do consider COLREGs and those who do not. Somewhat surprisingly, there is still significant research on algorithms belonging to the second category, possibly because the extent to which COLREGs apply to MASS has been unclear. However, in a recent scoping exercise, the IMO addressed this question by stating that ‘COLREG, in its current form, should still be the reference point and should retain as much of its current content as possible’ (IMO, 2021). Regarding algorithms that belong to the first category, these are often only designed to comply with parts of COLREGs, e.g., rules 13–17. An important reason for only considering this subset of rules is that these are the rules that are somewhat easier to interpret mathematically. Still, the vagueness of the rules poses a significant challenge, and a joint interpretation is likely required to make different collision avoidance algorithms compatible with one another.
However, even if joint interpretations of COLREGs are found, concerns remain about the co-existence of conventional ships and MASSs. For example, according to a study by Rutledal et al. (2020), the behavior of vessels at a Norwegian ferry crossing differed from COLREGs in a significant portion of the encounters. Such deviations are permitted, for example, under COLREGs rule 2. While the vessels involved likely would have exhibited different behavior if they had no means to communicate, large vessels often take for granted that smaller vessels will give way, even if they have the right to stand on according to COLREGs. Consequently, if a MASS does not predict such ‘common sense maneuvers’, dangerous situations could occur. To address this problem, Porathe (2020) suggested more extensive communication in addition to a traffic separation scheme called moving havens, inspired by the coordination of friendly submarines during military exercises. Nevertheless, others, such as Relling (2020), argue that total self-governance of MASSs is neither achievable nor desirable and should, therefore, not be the objective.
2.3. VHF and AIS communication
Today, VHF radio and AIS facilitate information exchange between ships and shore centers, e.g., VTS. The shore centers coordinate ships in ports, harbors, straits, or other areas in their responsibility to prevent incidents such as collisions and groundings. For example, a VTS can guide ships over VHF radio by monitoring the sea traffic using radar and AIS and mapping the information on an electronic navigational chart. Additionally, when in doubt of navigation safety outside of a VTS responsibility area, it is common among mariners to call other vessels over VHF radio to ask for their intention or local advice. Unfortunately, verbal communication is prone to misunderstandings caused by language barriers, accents, and cultural differences.1 Furthermore, high communication traffic in congested waters can affect the radio communication quality. Therefore, mariners also use non-verbal actions to communicate intentions between vessels. An example of a non-verbal action would be an apparent course and speed change compatible with COLREGs. But the action should be visually observable by eyes, radar, Electronic Chart Display and Information System (ECDIS), or AIS to leave no room for doubt about the ship’s intention.
The AIS operates in the VHF maritime mobile band and was developed as a tool to help avoid collisions at sea when vessels are out of range of shore centers. According to the International Convention for the Safety of Life at Sea (SOLAS), Chapter V, all commercial vessels over 300 gross tonnages that travel internationally, as well as all passenger vessels, must be equipped with an AIS Class A transponder, while smaller vessels may be equipped with Class B transponders (IMO, 1974). The Class A transponders transmit dynamic data every 2–10 s while underway and every 3 min while at anchor, and static data every 6 min. Conversely, Class B transponders transmit their position whenever the transmission slot is empty (Golaya and Yogeswaran, 2020). Importantly, this may cause Class B transponders not to transmit data in congested waters.
The data transmitted over VHF is used by ships for collision avoidance, by VTS for traffic management, and by coastal authorities to obtain information about the ship and its cargo. Also, it is used to increase situational awareness in emergencies, such as for search and rescue or environmental pollutionincidents. While information from AIS can be used by collision avoidance algorithms, it is important to be aware that not all ships are fitted with AIS. Furthermore, the dynamic ship data describing the course, speed, and position come from Global Navigation Satellite System (GNSS) receivers and internal instrumentation, such as gyroscopes, onboard the vessel. This data could be tampered with before being transmitted over AIS. Additionally, static data describing the location of the position-fixing antenna is manually entered into the AIS transponder and could be erroneous and out of date. Finally, voyage-related data describing the ship’s draught and route plan are rarely updated. These weaknesses are compounded by the fact that AIS messages are transmitted without integrity checks, meaning the system accepts messages containing transmission errors, or worse, spoofed messages containing false data. For these reasons, collision avoidance algorithms should not solely depend on AIS data but rather use its data transfer feature for collaboration if additional integrity checks are imposed.
2.4. VHF data exchange system
The VHF marine mobile band was initially used for voice communication but has later been revised by the International Telecommunications Union to include designated data transmission channels. Since AIS messages are transmitted over these channels, the extensive use of AIS and increased demand for data transfer have caused congestion in these radio channels in heavily trafficked areas. Combined with the lack of integrity checks, this severely limits the utility of AIS in these regions. As such, the VHF Data Exchange System (VDES) has been developed as an extension of the AIS system.
The new VDES system integrates the AIS system with two other systems called Application Specific Messages (ASM) and VHF Data Exchange (VDE), using separate terrestrial and satellite channels. The ASM channels enable the exchange of standardized messages and are used to lighten the load on the AIS channels, while the VDE channels enable high-speed data transfer of customized services. Furthermore, the VDES system permits additional integrity checks to detect faulty transmissions and forward error correction. The VDES system is expected to be retrofitted on existing vessels and be widely adopted by 2025 (IALA, 2019).
2.5. Broadband networks
Maritime communication systems such as AIS, VDES, Global Maritime Distress Safety System, and Navigational Telex have extended their coverage by MF/HF/VHF frequencies. However, these systems have limited bandwidth. If satellite-based solutions are used, they can provide global coverage, but at the same time, they suffer from high latency and high costs. As such, recent studies are investigating how to use high-speed, broadband terrestrial mobile networks, e.g., 4G and 5G, for coastal maritime applications. Some of the technologies explored are WiFi, WiMax, and Long-Term Evolution (LTE), and the studies are focused on 2.4 GHz, 5.2/5.8 GHz, and 5G mmWave frequency bands for the maritime wireless channels.
The Republic of Korea works on the LTE-Maritime Project to provide data rates of over 10 Mbps, with a coverage of 100 km from the base stations, which are placed on mountains for increased an line of sight (Jo and Shim, 2019). Similar to LTE, WiMax (IEEE 802.16j) offers high data rates and wider coverage with the help of multi-hop networks (Choi et al., 2014). Multi-hop networks consist of base stations, relay stations, and mobile stations, which are end-users. The Norwegian Research Council’s MAMIME project aimed to collect WiFi measurements at 5 GHz in the field with an autonomous ship, i.e., Kongsberg Seatex AS’s Drone I. The test results demonstrated high data rates, between 10–700 Mbps, from a maximum range of 4800 meters (Yang et al., 2018). For applications to transfer more data over longer ranges, Kongsberg’s Maritime Broadband Radio provides data rates up to 16,5 Mbps at ranges up to 55 km (Kongsberg, 2021). High-speed, broadband data transfer is needed to control and monitor MASS from shore control centers. Moreover, MASS connectivity can be supported by collaborative usage of satellites, multi-hop networks, mobile broadband technologies, and long-range terrestrial systems. Consequently, broadband network solutions are attractive options for collaborative collision avoidance systems near shore.
2.6. Multimodal connectivity and the maritime connectivity platform
Zolich et al. (2019) gives a comprehensive review of the available communication links at sea, and Fig. 4 illustrates some of the communication links that may be used. With such a wide range of communication links available, maintaining connectivity when switching communication technology is crucial, and we refer to concurrent communication across different communication technologies as multimodal communication. For example, vessels taking advantage of high-bandwidth mobile broadband communication in coastal regions should maintain the connection with nearby ships if they switch over to VDES. In a survey on these issues, Höyhtyä and Martio (2020)suggested the use of a connectivity manager whose job it is to ensure that data is transmitted over the appropriate communication channels, subject to requirements such as capacity, latency, and service availability.
 Fig. 4. Communication technologies that can be leveraged for collaborative collision avoidance purposes.
Fig. 4. Communication technologies that can be leveraged for collaborative collision avoidance purposes.To establish an infrastructure for secure, multimodal communication at sea, the Maritime Connectivity Platform (MCP) is being developed (Weinert et al., 2018). The MCP is an open-source, decentralized communication framework that connects maritime stakeholders and maritime information services. The MCP includes three main components; the Maritime Identity Registry (MIR), the Maritime Service Registry (MSR), and the Maritime Messaging Service (MMS). The MIR provides secure communication by verifying and enabling authorized stakeholders to reach the services, and authentication of users is done by Public Key Infrastructure (PKI) and Open ID Connect methods. The MSR is a collection of maritime services where stakeholders can register new services to the platform. Finally, the MMS provides the information exchange part of the service by considering the geographical location and available communication links between users. As such, the MCP is a promising communication framework, and governmental authorities and non-profit organizations are taking part in the project. For example, a collaborative collision avoidance algorithm can be registered as a new service for both conventional ships and MASS usage, and the PKI of the MCP can benefit the cybersecurity part of the collaboration.
2.7. E-navigation and route exchange
To bring shipping into the 21st century, the IMO has adopted an e-navigation strategy plan. The goal of the plan is to enhance maritime safety, security, and protection of the marine environment while also reducing the administrative burden and increasing the efficiency of maritime trade and transport. The IMO defines e-navigation as “the harmonized collection, integration, exchange, presentation, and analysis of marine information on board and ashore by electronic means to enhance berth to berth navigation and related services for safety and security at sea and protection of the marine environment” (IMO, 2018).
An important concept explored through e-navigation projects is that of route exchange, first investigated by the Danish Maritime Safety Administration through the EfficienSea project between 2009 and 2012 (EfficienSea, 2011). The idea was that mariners could create and broadcast waypoints to coordinate their intentions as an alternative to verbal VHF communication. These ideas were expanded upon by Porathe and Brödje (2015a), who proposed the use of two concepts called tactical and strategic route exchange. A tactical route exchange consists of a limited number of waypoints, while a strategic route exchange contains all waypoints of the voyage plan. The idea is that strategic route exchange should be limited to ship-to-shore exchange with authorities, e.g., traffic coordination centers, for business and security reasons, while tactical route exchange can be used for ship-to-ship and ship-to-shore exchange for navigational safety and collision avoidance purposes. The successor of the EfficienSea project, EfficienSea 2, ran between 2015 and 2018, intending to test VDES and MCP concepts.
The MONALISA 1.0 project tested route exchange concepts on bridge simulators and in the Baltic Sea between 2010–2013 and developed the RTZ route exchange format (Porathe et al., 2014a, Porathe et al., 2014b). The RTZ route exchange format was developed further in the successor, the MONALISA 2.0 project (STM, 2015). The resulting format was then formally standardized as the S-421 route exchange format by the International Electrotechnical Commission (IEC) in IEC 61174 (IEC, 2015) and later IEC 63173-1 (IEC, 2021). These route exchange files consist of three main components where the first part contains general information of the route, the second part contains route geometry, e.g., waypoints, legs, turn radius, revision, etc., and the third part contains a schedule for waypoints and legs.
During the ACCSEAS project, which ran from 2012 and 2015, e-navigation concepts were tested in a test-bed in the North Sea region. Through bridge simulations where a route exchange concept was integrated with the ECDIS, it was found that simultaneously displaying the ship’s real position and overlapping, exchanged routes were confusing for the operators. Therefore, to decrease the confusion, a feature that enables or disables the planned route is suggested (Billeso, 2015). Also, considering the possible confusion and user interface problems, the route exchange is not suggested to be used in close-range scenarios by Porathe et al. (2015b).
The Sea Traffic Management (STM) project suggests using route exchange as a strategical tool to support the decision-making of safe trajectories rather than using it in close encounters. Bridge simulation tests (STM, 2019b) showed that mariners were more likely to breach COLREGs when routes were exchanged. It is stated that multiple, overlaid routes would confuse the mariners, and it would be hard to use route exchange in close-range scenarios. Additionally, STM defined requirements for route exchange (STM, 2019a).
A timeline of relevant e-navigation projects is shown in Fig. 5. While the e-navigation projects did not treat collaborative collision avoidance specifically, many of the concepts and ideas developed through the projects are useful tools that can help facilitate collaborative collision avoidance.
 Fig. 5. A timeline of e-navigation projects.
Fig. 5. A timeline of e-navigation projects.3. Collaborative collision avoidance in maritime applications
We proceed by investigating how previous studies have approached collaborative collision avoidance in the maritime domain. As we will see, the main distinction in the classification of collaborative collision avoidance algorithms is the communication architecture used. The communication architecture of collaborative multi-agents can be set up in two ways; centralized or decentralized. Both approaches have advantages as well as disadvantages. In centralized approaches, a central processing unit or master unit is assigned to solve the collision avoidance problem for all the collaborating ships. The master unit can be a shore station, for example, VTS, or an off-shore agent. All the information should be transmitted to the master unit to create a complete situational awareness. If the master unit has full access to information about each agent, then such centralized approaches can find globally optimal solutions. However, centralized approaches are vulnerable to situations where the master unit is missing information or unable to communicate with some agents. In decentralized approaches, each agent shares information with others and then solves the collision avoidance problem locally by using the information currently available to each agent. While this approach may not lead to a globally optimal solution, it is more robust to asynchronous information states and communication problems.
3.1. Decentralized approaches
Although collaborative collision avoidance has not been studied as heavily as self-contained collision avoidance algorithms, some researchers have stressed the importance of interaction between ships. For example, Hu et al. (2006)and Qinyou et al. (2006) pointed out the lack of interaction features between ships in existing collision avoidance algorithms and proposed a decentralized two-ship negotiation protocol in the open sea for COLREGs-compliant give-way and stand-on responsibilities. The proposed protocol, i.e., the Collision-Avoidance Negotiation Framework (CANFO), is initiated by the give-way ship or the one that first detects the collision risk, and the contribution of this study is that the negotiation intention is proportional to the ship’s gross tonnage. If the stand-on ship is smaller, the give-way vessel can be more willing to propose alternative trajectories. Hu et al. (2008) improved the negotiation protocol further by integrating the planned routes of both ships into the negotiation. However, since these studies only consider interactions between two compliant agents, the practical usefulness of the proposed protocol is unclear.
Liu et al. (2007) implemented a Multiple Agent System (MAS) model for ship collision avoidance by using the Beliefs Desires and Intentions (BDI) framework to simulate human knowledge and reasoning for the ships and VTS. Sailing-related static and dynamic ship data and practical collision avoidance rules correspond to beliefs, goals such as stand-on, give-way, emergent avoidance, and minimizing risk correspond to desires, and functions or sets of actions to achieve a goal correspond to intentions. Using this concept, ten types of messages, e.g., inform, request, advice, accept, and reject, can be sent to facilitate communication between ships over AIS. Later, Liu et al., 2008a, Liu et al., 2008b designed decentralized, centralized, and negotiation-based collision avoidance algorithms for multiple vessel encounter scenarios. In the first algorithm, each ship calculates its route without collaboration. In the second algorithm, a delegated leader calculates collision-free routes. Finally, in the third algorithm, the negotiation process is initiated by a ship and runs until all ships agree to the negotiated solution. While the work is noteworthy, the performance of the negotiation procedure is unknown because they do not show complicated scenarios.
Online evaluation of the risk of collision is an important feature to help determine when and with whom to initiate collaboration and collision avoidance actions. However, in multi-ship scenarios, merely determining that a risk of collision exists is not sufficient. Instead, the collision risk must be quantized such that target ships can be sorted according to risk values. Kim et al. (2014) proposed a fuzzy theory-based approach for calculating collision risk by including Distance to the Closest Point of Approach (DCPA), Time to the Closest Point of Approach (TCPA), and change in relative bearing. In the proposed Distributed Local Search Algorithm (DLSA), each ship calculates its proposed course and its contribution to reducing the collision risk. The ship with the most significant contribution changes its course. The exchange of intentions and course changes continue until the ships reach their goal destinations. Kim et al. (2015) later developed the Distributed Tabu Search Algorithm (DTSA) to improve the efficiency of DLSA and eliminate quasi-local minimum states, i.e., the inability to generate a course change even though there is a risk of collision. In quasi-local minimum states, the DTSA forces ships to choose a new route. However, it was realized that both DLSA and DTSA required frequent messaging between ships before converging to a steady state. To reduce message traffic, Kim et al. (2017) proposed the Distributed Stochastic Search Algorithm (DSSA) presented in Fig. 6. Simultaneous stochastic course changes often lead to faster convergence to a solution and naturally eliminate the occurrence of quasi-local minimum states. The author conducted further simulations of the DSSA algorithm with multiple vessels and reported the importance of the parameters, i.e., safety domain and detection range, on the collision avoidance performance (Kim, 2019). The aspects of DLSA, DTSA, DSSA that may be improved can be listed as considering speed changes and investigating how to reach a solution where non-cooperative and conventional ships are present.
Hornauer and Hahn (2013) included non-cooperative ships in their collaborative collision avoidance algorithm by using a probabilistic approach. Mean course and speed values of non-cooperative ships were calculated from historical AIS data and used to predict optimal trajectories of negotiating vessels. Nash Bargaining and distributed optimization methods were used to calculate optimal trajectories. In their following study, the A* algorithm was used in the creation of new trajectories during the negotiation, and Nash Bargaining was used to converge to the decentralized solution (Hornauer et al., 2015).
