1. Introduction
Globalization is leading to a rapid growth in maritime transport, both in size and number of vessels. The world seaborne trade has increased substantially in the past two decades (UNCTAD, 2013). As shown by Ducruet and Notteboom (2012), the total port throughput has exponentially increased during the last 50 years, and it has been more than doubled just in the last 20 years. The increase in throughput is linked to more vessel movements. Since ports are quite inflexible infrastructures and difficult to expand, the situation has led to higher traffic densities and eventual congestions in some areas. Ports accommodate a higher traffic demand without a waterway infrastructure expansion that implies, in many cases, longer waiting times for vessels, which reduces the efficiency of the system. Because of this increasing demand and the limited nautical infrastructure (berths and sailing areas), vessel navigation related processes in the port become decisive for port performance. Existing ports might need be optimized or expanded and new ports have to be planned considering these limitations. In both cases, their safety and capacity, among other factors, should be guaranteed and tools to assess them in different designs are required.
Maritime transportation simulation models have been proven to be useful tools to represent port operations and processes to assess port performance. Several models have been developed during the last decades with many different purposes, such as strait or waterway performance or maritime risk assessment. Regarding traffic simulation in straits, several models represent navigation systems as queueing systems, with first in first out (FIFO) sequences (Golkar et al., 1998, Köse et al., 2003). Waterway traffic representation has been another subject of interest (Almaz and Altiok, 2012, Hasegawa et al., 2001, Xiao et al., 2012, Xiao et al., 2013, Xu et al., 2015). In relation to risk assessment, a risk index-based model for vessels was developed, the safety assessment model for shipping and offshore on the North Sea (SAMSON) model, by Maritime Research Institute Netherlands (MARIN, 2015). Furthermore, a simulation model for vessel traffic based on ship collision probability has been developed (Goerlandt and Kujala, 2011). Moreover, there are models for detailed port representation and performance analysis (Bellsolà Olba et al., 2017, Groenveld, 1983, Scott et al., 2016, Thiers and Gerrit, 1998).
As described in the previous paragraph, there is a wide range of maritime simulation models with different purposes. In this paper, we present a state-of-the-art of port models and we assess their applicability to port risk and capacity assessment, as a base for the future development of a port assessment methodology based on a suitable simulation model. This research includes some models recently reviewed (Bellsolà Olba et al., 2015) and models that have been developed since then. It includes, to the best of our knowledge, all the current non commercial port simulation models, which features are described in detail in scientific publications. The commercial models are excluded because their details and features are not available. In previous work, the most relevant processes involved in port navigation were identified a more comprehensive description is presented in Section 2. Moreover, this paper reviews and assesses the models already developed on these processes in a more detailed level. The calibration of the models is an important step to ensure that they properly simulate real traffic. Hence, all the models have been assessed based on if they have been calibrated or not.
The outline of this paper is as follows. Section 2 describes the nautical processes in a port. Section 3 identifies all the required criteria for port traffic simulation. Section 4 describes the characteristics of the criteria identified. Based on these, the assessment of simulation models will be discussed in two parts, layout and navigational behaviour, in Section 5. This paper concludes with a discussion of the results with an overall model assessment in Section 6, and conclusions and remarks for future model development in Section 7.
2. Port nautical processes
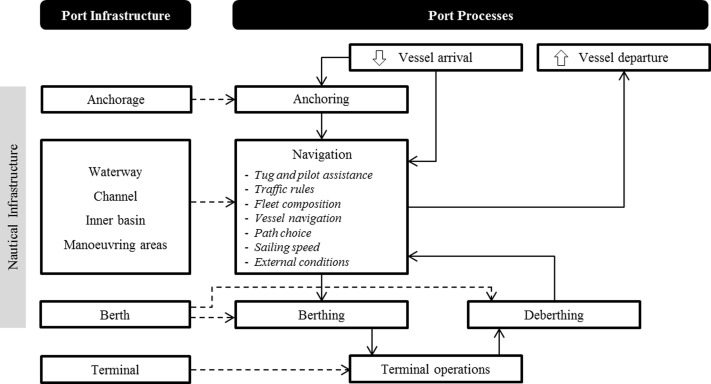
Ports are complex networks, both from an infrastructure and navigation point of view. This section describes the main processes linked to the nautical infrastructure necessary to represent the vessel traffic in a port and its evaluation (Fig. 1).
 Fig. 1. Diagram of port nautical infrastructure and processes.
Fig. 1. Diagram of port nautical infrastructure and processes.Traffic processes in a port start when a vessel arrives and requests access. The vessel traffic service (VTS) provides information about the berth availability and other conditions, such as weather or tide. If it is feasible to enter the port, the traffic situation is checked. Vessels with permission from the port authorities can enter the port and sail towards their destination. Otherwise, they wait outside the port in the anchorage until permission is given. Vessels with specific navigation requirements or limitations will need pilot and/or tug assistance.
Once a vessel is allowed to enter the port, it sails to a specific berth through the approach channel or entrance waterway. Until its arrival at the berthing area, each vessel will sail through different parts of the port, such as turning basins, crossings or inner basins. Each of these areas has specific requirements in sailing and manoeuvring, also depending on the vessel characteristics. Vessels can usually sail in any position inside each section of the port, but, to avoid groundings, there are some fixed corridors or paths for vessels with the deepest draughts.
After the vessel has performed all these steps, the berthing process is performed and loading/unloading operations start. These operations aim to control the movement and storage of cargo within the terminal and stacking area, entry/exit gates and rail or road connections. When the loading/unloading operations are completed, vessels are ready to depart; they are required to ask for new permission to leave the port or sail towards another berth. The reverse navigation process occurs when they are allowed to sail towards their exit.
3. Assessment methodology
Port simulation models have specific requirements to likely represent the overall vessel navigational behaviour. Hence, existing port simulation models (non commercial) are compared with respect to their current ability to represent the different traffic demands in a port and its associated processes. Fig. 1 shows the representative port infrastructure parts and the main processes. The basis of comparison within this review is to assess each of the characteristics of port processes and vessel navigation that an ideal model should be able to replicate for capacity and risk analysis of a port. This study compares the capabilities of existing models, developed with different purposes, to provide a realistic representation of vessel traffic in ports. In the following paragraphs a description of the relevance of the attributes introduced in Fig. 1 is presented.
Since manoeuvring areas (where vessels make complex turns) or inner basins can become a key element in the performance of a busy port and their analysis should be possible, the inclusion of all nautical infrastructure parts is necessary. They can lead to substantial variations in the sailing process of a vessel and thus imply variations in sailing times. Detailed research in the anchoring process has already been performed and could be implemented to make this process more realistic Huang et al. (2011). At least anchoring should not be considered as a simple queue process, where the influence of anchorage dimensions and vessel distribution does not affect its performance. In the same line, berthing processes are relevant and should be included as an independent parameter, from terminal operations in simulation models that aim to assess the vessel traffic performance. The rest of the terminal operations could be considered together.
The inclusion of tugs and pilots is necessary for any port simulation model. However, the best way to do that is not clear. Including their position at any time could make it more realistic but more time consuming, so it could be implemented with their dwell or idle times. Moreover, the number of tugs and pilots available should not be assumed to be infinite.
Explicit and detailed traffic rules can allow their assessment individually. A control and traffic verification agent has been shown to be relevant and should be considered (Xiao et al., 2013). A detailed implementation of these rules allows a more accurate analysis of the results. It might also help to identify hidden traffic management problems behind simulation results and new traffic management strategies could be implemented.
Vessel arrivals have been extensively discussed in previous research (Fararoui, 1989, Groenveld, 2001, Nicolaou, 1967, Noritake and Kimura, 1983, Pachakis and Kiremidjian, 2003, Thiers and Gerrit, 1998). It can be agreed that the most suitable distributions for new ports are negative exponential distribution (or Poisson and Erlang-1 as discrete distributions), with the desired and expected parameters. For existing ports, and thanks to AIS data availability, historical data analysis shows to be the best option to adjust the most suitable vessel demand. For new port vessel arrival estimation, AIS data from similar ports could be extrapolated to the new scenario, which would make the estimation closer to reality. Specific idiosyncrasies in vessel arrival process for each port should be taken into account, such as seasonality, because they could cause relevant differences in the final performance.
In terms of fleet composition, making clear groupings of vessels can lead to a more precise simulation model. The classification should be accurate and the different groups should be chosen based on their similarities in navigational behaviour. Although vessel speeds do not change instantaneously, the possibility of a model to include free speed choices and changing with time, fits better an accurate representation of vessel navigation in a port. In addition, the influence on vessel navigation of the infrastructure and encounters between vessels should be included. Free course choice and the influence of the infrastructure or other vessels on vessel navigation is really relevant to assess different situations and specific behaviours that might affect the safety of the port. The inclusion of human factors, such as bridge team behaviour, in the sailing path should be considered (Hoogendoorn et al., 2013). Moreover, there is an extensive research on vessel behaviour based on AIS data (Shu et al., 2012, Xiao et al., 2012) that should be used for new model implementation. These features reassemble vessel navigation close to reality and consider all the specificities given certain infrastructure design and fleet compositions.
External conditions should be evaluated in each case, but a port model should have the possibility of including any option inside their structure. Tidal windows have an important effect on port processes and performance as an operational time limitation. Weather conditions, such as wind speed and direction, can also have relevant weight in vessel traffic navigation, depending on the location of the current study (Thiers and Gerrit, 1998). These conditions should be considered as behavioural effects on vessel behaviour and some correlations can be obtained based on AIS data analysis with different weather scenarios. Another important condition that can be crucial for navigation is current.
Based on the different relevant criteria described, the assessment is divided into two parts: the first part considers the nautical infrastructure representation according to which criteria can be modelled and how detailed is each of the processes according to our purposes, plus the assistance and the traffic rules that applied in the navigation; the second part is related to how navigational characteristics are modelled and how close the simulation resembles to reality. All port infrastructure parts, and the corresponding processes, which are summarized in Fig. 1, should be included in a model, which are: 1) nautical infrastructure, 2) anchoring, 3) berthing and 4) terminal (s) operations, 5) pilot/tug assistance and 6) traffic rules. Moreover, the main criteria that affect navigation depending on each type of vessel are: 1) vessel arrival process, 2) fleet composition, 3) influence of infrastructure design or vessel encounter on the navigation, 4) course choice possibility, 5) speed variation, 6) external effects and 7) model calibration. Thus, these criteria are used as a basis for the assessment criteria in the next section, and below are explained.
The information about each of the simulation models used in this review is obtained from the published papers describing them. Since the authors of this paper do not have the models available, we assume that the description of the simulation models presented in the papers agrees with their real implementation.
4. Assessment criteria for port nautical simulation models
A detailed description of all criteria, both related to port infrastructure or navigation, identified in the previous section are presented in this section. Their influence on port nautical infrastructure processes and traffic is described and a rating system is chosen for each element in order to compare the different models.
4.1. Nautical layout assessment
This section describes the criteria used for the assessment of the infrastructure design in the simulation model. These are the nautical infrastructure, the anchorage, the berths, the terminal operations, the tug and/or pilot assistance and the traffic rules considered.
4.1.1. Nautical infrastructure
The nautical infrastructure in ports is divided into channels (the main waterway for this type of models), inner basins and crossings or manoeuvring areas. Each of these areas has specific navigational characteristics and traffic rules that, in reality, lead to differences in navigation. Due to these differences through each part of the infrastructure, the model capability to simulate realistic port traffic highly depends on the parts which are considered. Hence, the simulation model is expected to represent them too.
Models will be classified in this part depending on the inclusion of the infrastructure for modelling vessel traffic behaviour in the different parts of the infrastructure realistically, therefore the following scheme is used:
-
A
Anchorage
-
W
Waterway/channel
-
I
Inner basin
-
M
Manoeuvring areas
-
B
Berth
4.1.2. Anchorage
As the competition between ports increases, all processes should be optimized and vessel arrival processes, such as the anchorage allocation or the entrance to the port, become crucial and these processes need to be minimized. However, few research into anchorage capacity, definition or assessment, has been done. Literature shows only a couple of recent studies were addressing this topic (Huang et al., 2011, Verstichel and BergheVanden, 2009).
In order to improve the current situation and give the importance that anchoring spots have, from captains and ship masters experience, Huang et al. (2011) concluded that vessels usually tend to stay close to each other. In addition, due to anchorage complexities, they adapted disc-packing algorithms to optimize the specific vessel allocation in an anchorage, based on the ship lock optimization problem. The captain's decision in choosing an anchoring position was included in order to make the algorithm more realistic.
Each model will be classified with a rating system as follows, and which level of detail should be required for this process, for a suitable port risk assessment, will be discussed in Section 5.
-
√√
Anchorage allocation algorithm, detailed infrastructure and manoeuvring
-
√
Anchorage with dimensions and vessel sailing
-
√/×
Anchorage with dimensions and vessel time allocation within the model
-
∼
Queueing system without dimensions within the model
-
×
No anchorage within the model
4.1.3. Berth
As Section 4.1.2 introduced, the importance of each process in port performance is crucial for minimizing costs and dwell times. For this reason, vessel berthing has been an important process studied in detail by several researchers. A topic of interest has been berth allocation (Alvarez et al., 2010, Arango et al., 2011, Fararoui, 1989). However, this is a process more related to vessel arrival optimization than analysing the vessel berthing process and its dwell time, depending on its characteristics.
There are different levels of detail to describe the berthing process, since it can be seen as one process with a dwell time associated (Bellsolà Olba et al., 2017, Scott et al., 2016, Yeo et al., 2007) or, on the contrary, the different steps of the berthing process and their related manoeuvring can be included, such as speed reduction, tug assistance and mooring ropes (Okazaki et al., 2009). The details for this process can be relevant when considering busy basins or waterways. At certain locations, due to specific traffic situations, berthing manoeuvring can become a bottleneck for port processes or can have higher risk than expected. Although, from a higher level of analysis, berthing can be less relevant, a complete implementation of the different processes involved would give a more realistic performance of the system.
The aim of the comparison of the berthing processes is to identify how berthing time and manoeuvring is simulated for each of the models. The rating scheme used to classify it is as follows:
-
√
Berthing manoeuvring process
-
√/×
Berthing process simplified (no manoeuvring modelled)
-
×
No berthing
4.1.4. Terminal operations
There is extensive literature related to terminal operations, its optimization and improvement. An extensive review on crane and terminal optimisation was developed by Stahlbock and Voβ (2007). Related to terminals, researchers have also focused on terminal simulation modelling (Hassan, 1993, Kia et al., 2002). Terminal operations analysis and simulation comparison are out of the scope of this paper. However, since the berthing process can be included as part of the terminal operations, it is important to know how these operations has been considered in different models. Thus, even though the simulation is not detailed, there is a need to include all the different tasks separated to not forget any characteristic of the port. In order to classify them, the following scheme is proposed:
-
√
Detailed terminal operations
-
√/×
Joint terminal operations
-
∼
Joint terminal and berth operations
-
×
No terminal operations
4.1.5. Tug and pilot assistance
Ports often have restrictions on navigation for several types of vessels because of their dangerous cargo or difficult manoeuvring characteristics, that require assistance by tugs or a pilot to assure safe navigation inside the area. Although each port usually has a certain number of tugs and pilots, some models consider an unlimited number of them as a simplification. The level of detail of the assistance cannot be assessed from the descriptions. Hence, models are rated depending on the following considerations:
-
√
Limited number of tugs and pilots
-
∼
Unlimited number of tugs and pilots
-
×
No tug and pilot assistance
4.1.6. Traffic rules
Traffic rules in ports usually follow the rules of the International Maritime Organization (IMO) plus their own specific rules due to their specific design characteristics. As mentioned before, VTS centres control if vessels follow these rules and that they do not initiate dangerous situations. These rules are directly related to risk and safety levels, and the more detailed they are, the better the risk assessment can be carried out.
The inclusion of the traffic rules in the models can be at different levels of detail and they have been classified according to the parameters considered below:
-
H
Minimum headway with predecessors
-
E
Encountering priority rules
-
S
Speed reduction during encounters
-
O
Overtaking possible when right traffic conditions
-
C
Crossing priorities
-
?
Unknown/not specified
4.2. Navigational behaviour assessment
The second group of assessment criteria focuses on attributes that has influence in the vessel navigational behaviour. The attributes considered are the vessel arrival process, the fleet composition, the vessel navigation itself, the course choice for vessels, the sailing speed, the external conditions affecting navigation and the model calibration.
4.2.1. Vessel arrival process
The first process in a port is the vessel arrival, which will condition the berth allocation and terminal planning. This is a complicated dynamic process that compromises waiting times and vessel queues. There is not an extensive amount of research publications focused on the arrival process itself, since it is a difficult process to evaluate.
The arrival process is dependent on the shipping lines in a port which can determine, more or less, scheduled arrivals. However, external factors as weather conditions or engine failures can affect this regularity. Due to the variety of operators in a port and these external factors, the most common situation is a random arrival process. A negative exponential distribution (NED) has been statistically proven to reasonably correspond with this kind of arrival, as a continuous distribution (Fararoui, 1989, Groenveld, 2001, Noritake and Kimura, 1983, Pachakis and Kiremidjian, 2003), or with its discrete derivation as a Poisson distribution (Nicolaou, 1967, Thiers and Gerrit, 1998). Different vessel arrival patterns for individual shipping lines were analysed by Van Asperen et al. (2003). Equidistant arrivals, stock-controlled arrivals already scheduled and Poisson distributed arrivals were compared to evaluate their effects on port performance.
The correlation between vessel arrivals and approximations for queueing systems were developed in the specific case of marine bulk cargo ports (Jagerman and Altiok, 2003), and it was proven that there is a negative correlation of the arrival instant between two consecutive vessels. Hence, when two consecutive vessels arrive in a short time interval, the following vessel is expected to arrive in a longer time interval. When a shipping line has a regular service, vessel inter-arrival time distribution mainly follows the Erlang-k Distribution (Kuo et al., 2006). In these cases, contrary to assumptions in other studies, arrivals are not independent.
For the simulation of processes in ports, vessel arrival becomes a relevant parameter that has to be properly considered since it can condition the design of a new port or the expansion of an existing one. For existing ports, a good representation of vessel arrival patterns, based on historical data, can help to improve traffic scheduling or traffic management.
The most suitable choice would be to base the vessel arrival on a prediction from historical data, considering the stochasticity of the arrival process. However, in case of not having historical data, the most appropriate choice is a NED as explained before.
Each model will be classified depending on the way that vessel arrival is performed:
-
N
Negative exponential distribution (NED)
-
P
Poisson distribution (discrete NED distribution)
-
E
Erlang-1 distribution
-
H
Historical data
4.2.2. Fleet composition
In navigation, the behaviour of each vessel is different. Their different sizes and weights influence their movements and speeds, as well as braking times or rudder angles. Fleet composition in the models has been rated depending on their ability to simulate different type of vessels.
-
√
Different types of vessels
-
×
Unique vessel type