1. Introduction
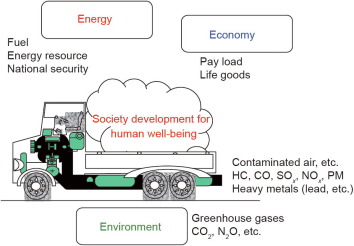
The internal combustion engine (ICE) is an attractive power source for automobiles. Our daily lives heavily depend on transportation vehicles based on high-performance ICEs, which have the advantages of superior storability, transportability, and suppliability of liquid fuel with high energy density. However, ICE vehicles are also related to serious issues involving energy resources, the economic situation, and the environment—a “3E” (i.e., energy, economy, and environment) tri-lemma problem, as shown in Fig. 1. To solve this 3E tri-lemma problem, more compact ICEs with high performance and a low environmental load are required.
 Fig. 1. The “3E” tri-lemma problem of ICE vehicles. HC: unburned hydrocarbons; PM: particulate matter.
Fig. 1. The “3E” tri-lemma problem of ICE vehicles. HC: unburned hydrocarbons; PM: particulate matter.Electricity and other alternative power sources have recently become widely used in light-duty vehicles (LDVs). Fig. 2 [1] shows trends in the LDV market in the United States. Various perspective reports have been produced regarding the expansion market of electric vehicles (EVs). These reports show that the EV market size is slowly expanding, although society wants a rapid and more drastic expansion of the market. The power source of hybrid electric vehicles(HEVs) is liquid petroleum, as in ICEs, and the petroleum engine market will remain as the main market of LDVs in 2050. EVs are a suitable transport technology for maintaining a clean environment. When the electricity of plug-in hybrid electric vehicles (PHEVs) and battery electric vehicles (BEVs) comes from natural energy such as photovoltaics, use of these vehicles contributes to the reduction of greenhouse gas (GHG) emissions. However, electricity is a risky energy source for vehicles due to its lower storability, transportability, and suppliability in the case of unexpected disasters. These disadvantages may be some of the reasons behind the low penetration speed of BEVs into the transportation market.
 Fig. 2. The evolving LDV market in the United States: Percent sales by powertrain type from 2015 to 2050. Other major regions are likely to have a similar evolution; diesel in Europe is currently at about 50 % of ICEs sales, but that fraction is slowly decreasing [1]. FCHEV: fuel cell hybrid electric vehicle; NASI: natural aspirated spark ignition engine; TCSI: turbo-charged spark ignition engine.
Fig. 2. The evolving LDV market in the United States: Percent sales by powertrain type from 2015 to 2050. Other major regions are likely to have a similar evolution; diesel in Europe is currently at about 50 % of ICEs sales, but that fraction is slowly decreasing [1]. FCHEV: fuel cell hybrid electric vehicle; NASI: natural aspirated spark ignition engine; TCSI: turbo-charged spark ignition engine.High-efficiency and low-emission ICEs have been developed using various engine technologies including combustion improvement, after-treatment system development, and a hybrid system with a generator–battery–motor subsystem. For combustion improvement, new designs for the fuel injection rate and spray pattern during the injection period have been technically developed, and combustion can now be partially controlled in a conventional ICE. As a result, high-performance and low-emission engines have recently been commercialized.
This article proposes the new concept of attitude control of a fuel spray. Fuel spray attitude involves the configuration, movement orientation, and relative position of the fuel spray in the combustion chamber. The concept of attitude control includes: ① prediction of the current attitude, including spray penetration, spray width, and the plume angle of the spray; ② determination of the desired spray attitude in the chamber space; and ③ use of active control hardware to obtain the desired attitude. In the combustion field, a great deal is known about spray behavior, but little information is available concerning desired spray behavior. Thus, active control technologies for fuel spray attitude have not yet been developed. However, the establishment of a desired spray concept and the development of effective active control technologies for fuel spray are very necessary for the smart control of combustion. Cavitation, flash boiling, spray-to-spray interaction, spray-to-wall interaction, and air flow have potential as a basis for the active attitude control of fuel spray. This article uses evidence from the literature to discuss the possibility of developing active spray attitude control in order to achieve a suitable spray for future fuel spray combustion technology in smart compact ICEs.
2. Passive and active fuel spray control
It is well known that formation of the fuel spray mixture is the most important governing phenomenon of diesel combustion [2]; it is also a key process of the formation of the combustible mixture in a direct-injection spark ignition (DISI) engine. Fig. 3 shows how diesel spray dispersion in the combustion chambercontributes to the improvement of diesel combustion [3]. A wide spray angle of well-penetrated spray, along with high swirl and an intense squish air flow contribute to the formation of a suitable combustion mixture that is spatially dispersed in the chamber. The heat-release rate is considered to be controlled in order to obtain high power and reduce the combustion noise, NOx, and soot emissions, as illustrated in Fig. 4 [4]. It can be controlled using the fuel injection rate (time phase control). Injection rate control has become the main technology target of recent studies on advanced diesel combustion [5].
 Fig. 3. Diesel spray combustion [3].
Fig. 3. Diesel spray combustion [3]. Fig. 4. Change of the heat-release rate profile for diesel combustion improvement [4].
Fig. 4. Change of the heat-release rate profile for diesel combustion improvement [4].In order to discuss the active attitude control of spray, it is necessary to clarify the spray parameters to be controlled and the controlling methods used to do so. Table 1 summarizes the items and methods involved in fuel spray control. The spray tip penetration, spray angle, and microscopic structure of the fuel spray are the main items involved in fuel spray control. These are usually considered to be the characteristics of the spray. However, relative characteristics involving the combustion chamber configuration and combustion condition are also important for spray attitude control because the desired attitude of the spray usually changes with changes in the chamber configuration, engine speed, load, and so on.
Table 1. Control items and methods of fuel spray.
| Control methods | Control items | |
|---|---|---|
| Characteristics of the spray |
|
|
| Design parameters of the fuel spray injection | Static control |
|
| Dynamic control |
|
|
|
The methods used for fuel spray control can be classified into static and dynamic methods. Items that are controllable by static methods are the design parameters of the fuel spray injection, which usually remain unchanged under different engine operating conditions. However, some controllable items—classified as dynamic parameters—should be artificially changed for different engine speeds and loads. Such items are further classified into passive and active control items. Passive control items are controlled in a subsidiary manner to other parameters. For example, the injection rate of fuel changes in a subsidiary manner with changes in engine load. Similarly, while flash boiling of gasoline spray is usually observed in the early injection phase of a DISI engine, it cannot be controlled autonomously.
In contrast, active control items are autonomously controllable parameters. However, active control methods for these parameters have not been developed. The implementation of such active control methods will lead to great advancement in active fuel spray attitude control and in ICE technologies.
The following section discusses the possibilities of active control, with a particular focus on the active attitude control of fuel spray that is suitably dispersed in the chamber. Examples of attitude-controlled fuel sprays are provided in Fig. 5, which shows spray attitude control during the injection period. Once the active control of spray injection becomes possible, it will result in suitable fuel vapor distribution corresponding to the engine speed and load.
 Fig. 5. Examples of attitude-controlled fuel spray. (a) Diesel injector; (b) gasoline injector.
Fig. 5. Examples of attitude-controlled fuel spray. (a) Diesel injector; (b) gasoline injector.There are two kinds of spray control: time phase (temporal sequence series) control, such as injection rate control; and spatial phase control. With the full utilization of up-to-date spray technologies, artificial control of spray dispersion in a space can be partially attained by appropriately designing the spray angle and wall impingement. However, a new spray dispersion control principle is needed for future engine development—in other words, “spatiotemporal control” of the fuel spray is needed.
3. Passive fuel spray control
It is well known that gasoline direct-injection (GDI) spray is affected by the gas density in the cylinder. Fig. 6 shows examples of gasoline spray being injected and evaporated in low and high gas density surroundings [6]. In these examples, the injection pressure of the gasoline spray is 20 MPa and the surrounding temperature is 700 K—a temperature that is high enough for evaporation. The photos in Fig. 6(a) show spray behavior corresponding to naturally aspirated (NA) engine operation. Three fuel plumes and fuel vapor trace can be observed. The photos in Fig. 6(b) depict sprays corresponding to turbocharged engine operation. Due to the high surrounding gas density, the spray penetration is shortened and its penetration direction is changed from the original direction. Three spray plumes can be seen to be gathering together, due to the lack of air entrainment inside the plume cone. Fig. 7 [6] illustrates the analysis of the liquid and vapor plumes shown in Fig. 6.
 Fig. 6. Liquid spray comparison between (a) lower gas density conditions and (b) higher gas density conditions using raw images and detected contours. tASOI: time after start of injection [6].
Fig. 6. Liquid spray comparison between (a) lower gas density conditions and (b) higher gas density conditions using raw images and detected contours. tASOI: time after start of injection [6]. Fig. 7. Liquid and vapor spray contour comparison between (a) lower and (b) higher gas density levels at a chamber temperature of 700 K and an injection pressure of 20 MPa [6].
Fig. 7. Liquid and vapor spray contour comparison between (a) lower and (b) higher gas density levels at a chamber temperature of 700 K and an injection pressure of 20 MPa [6].The differences in the spray and vapor plumes under these two conditions come from the differences in spray attitude, which depends on the surrounding gas density. These differences result in different fuel vapor distributions in the cylinder and affect the combustion quality related to the operation condition of the engine. Detailed information—such as the surrounding gas density—is needed on the fuel distribution under each operating condition. Many reports are available on spray attitude behavior [7], [8]. However, spray behavior is controlled in a subsidiary manner to the surrounding gas density, and cannot be controlled autonomously. If the injection direction of a multi-hole injector could be actively controlled, the desired vapor plumes could be obtained independently from the surrounding pressure.
Wall impingement is an inevitable phenomena of diesel spray; its impingement behavior is investigated with spray tip penetration. This kind of information is useful for matching the design of the combustion chamber configuration with that of the injection system, including the diesel nozzle and injection pressure. Fig. 8 shows a typical diesel spray impinging onto the wall [9]. The dispersion of the wall impingement spray is very different from that of the free spray. A great deal of research [3] has been conducted on wall impingement spray in order to obtain a suitable diesel spray, as shown in Fig. 3. However, spray dispersion is controlled in a subsidiary manner by the wall impingement angle, and thus cannot be changed during the injection period.
 Fig. 8. Free and wall impingement diesel sprays [9]. θ: impingement angle.
Fig. 8. Free and wall impingement diesel sprays [9]. θ: impingement angle.Fig. 9 shows the typical behavior of normal impingement diesel spray. Here, the spray behavior is evaluated using the radial penetration length after impingement. The effect of the injection mass on the penetration is small because the spray tip movement is governed by the initial injection part of the spray; however, the injection pressure has a strong influence on the penetration. Spray tip penetration after impingement is controlled by the wall inclined angle, wall distance, and injection pressure. Therefore, diesel spray dispersion in the combustion chamber cannot be designed independently from these static control parameters.
 Fig. 9. Spray tip penetration of the wall impingement diesel spray. (a) Injection mass (Mf) effect; (b) injection pressure (Pinj) effect. Lr: radial spray penetration; Lz: spray penetration; Pa: ambient pressure.
Fig. 9. Spray tip penetration of the wall impingement diesel spray. (a) Injection mass (Mf) effect; (b) injection pressure (Pinj) effect. Lr: radial spray penetration; Lz: spray penetration; Pa: ambient pressure.The attitude of the impingement spray is mainly controlled by the impingement distance and impingement angle. The effects of these controlling parameters are dominant, and they are usually matching parameters of the fuel spray and combustion chamber [2]. Active control of the impingement spray attitude might be possible if the piston configuration could be changed during engine operation.
4. Active fuel spray control
4.1. Variable geometry nozzle
Nozzle geometry is an interesting design parameter of the nozzle. For a diesel injector, an adequate nozzle length and length-to-nozzle-diameter ratio (L/D) are usually selected in order to obtain the widest spray angle. Divergent and convergent nozzles are sometimes used to change the spray. The spray tip penetrations and spray angles of designed sprays are investigated as representative spray characteristics for injection conditions. Regarding a special configuration nozzle, a trial of a V-type intersecting nozzle can be found in the literature [10]. As shown in Fig. 10 [10], two nozzle holes meet together at the exit position. Fig. 11 [10] shows the angle of the spray injected through the V-type nozzle; it can form a flatness spray plume with an elliptical cross-sectional structure. This suggests the possibility of spray attitude control by means of nozzle geometry change, although it is not possible in terms of practical technology.
 Fig. 10. Geometries of (a) a cylindrical hole nozzle; (b) a V-type intersecting hole nozzle [10]. ϕds: diameter of sub-hole; Lu: length of the upper sub-hole; Ll: length of the lower sub-hole.
Fig. 10. Geometries of (a) a cylindrical hole nozzle; (b) a V-type intersecting hole nozzle [10]. ϕds: diameter of sub-hole; Lu: length of the upper sub-hole; Ll: length of the lower sub-hole. Fig. 11. Variations of the jet spreading angles with the impact angle. α: angle in xy plane; β: angle in xz plane [10].
Fig. 11. Variations of the jet spreading angles with the impact angle. α: angle in xy plane; β: angle in xz plane [10].Investigation into the characteristics of a spray formed by V-type nozzle has recently become popular, and a great deal of useful information has been accumulated [11]. However, few attempts have been made to apply this knowledge to active attitude control. Individual flow rate control for the A–Oand B–O nozzles shown in Fig. 10 forms the basis for active control, and nozzle cavitation control, which will be mentioned later in this work, will provide a solution.
Other evidence indicating the possibility of spray attitude control can be found in the off-axis needle valve motions shown in Fig. 12, Fig. 13 [12]. Here, the spray penetration direction and length are obviously changed by the offset of the needle valve. According to the original result of this research, the offset of the needle lift should be suppressed in order to ensure good reproducibility of the diesel spray for precise control of diesel combustion. However, this result suggests the possibility of spray attitude control by means of needle movement. X-ray shadowgraph technology to observe the off-axis movement of the needle has recently been developed [13], [14], [15]. The next step in establishing the new attitude control is offset ratio control by means of a new actuator.
 Fig. 12. Off-axis valve nozzle. Procedure of the inner nozzle flow and spray simulation [12]. (a) 1st step: inner nozzle flow simulation with valve motion; (b) 2nd step: data sampling of hole outlets; (c) 3rd step: spray simulation.
Fig. 12. Off-axis valve nozzle. Procedure of the inner nozzle flow and spray simulation [12]. (a) 1st step: inner nozzle flow simulation with valve motion; (b) 2nd step: data sampling of hole outlets; (c) 3rd step: spray simulation. Fig. 13. Top view of the spray shapes calculated with various off-axis valve motions at 0.8 ms [12].
Fig. 13. Top view of the spray shapes calculated with various off-axis valve motions at 0.8 ms [12].The two examples provided above are research works intended to determine the spray characteristics that are affected by nozzle geometry. However, a more important point of these works is that they indicate the possibility of artificial control of the spray attitude. Based on the above research works, the present author has developed the following two conceptual ideas for artificial spray attitude control during the injection period.
The first conceptual idea is a method of diesel spray control by means of needles with various geometries. The needle lift can be changed by the injection pressure of the fuel. This suggests the possibility of artificial control of the needle lift by injection pressure during the injection period. Fig. 14 illustrates the conceptual ideas of a throttling pintle needle and a sub-needle connected by a spring. These forms of needle control might result in changes in the spray attitude during the injection period, as shown in the figure. Fig. 15 illustrates the second idea for a DISI injector, in which a swinging orifice plate or nozzle-choking mechanism is adopted. In this idea, an additional actuator for plate swinging or nozzle choking is needed. It is the opinion of this author that future development of micro-electromechanical systems (MEMS) technology will make it possible.
 Fig. 14. The conceptual ideas of a throttling pintle needle and a sub-needle connected by a spring.
Fig. 14. The conceptual ideas of a throttling pintle needle and a sub-needle connected by a spring. Fig. 15. The conceptual ideas of orifice plate swinging and nozzle hole choking.
Fig. 15. The conceptual ideas of orifice plate swinging and nozzle hole choking.