1. Introduction
Wireless Charging Systems (WCS) have been proposed in high-power applications, including EVs [1], and plug-in electric vehicles (PEVs) [2] in stationary [3] applications. In comparison with plug-in charging systems, WCS can bring more advantages in the form of simplicity, reliability, and user friendliness [4]. The problem or limitation associated with WCS is that they can only be utilised when the car is parked or in stationary modes, such as in car parks, garages, or at traffic signals [3]. In addition, stationary WCS have some challenges, such as electromagnetic compatibility (EMC) issues, limited power transfer, bulky structures, shorter range, and higher efficiency [5], [6], [7]. In order to improve the two areas of range and sufficient volume of battery storage, dynamic mode of operation of the WCS for EVs has been researched [8], [9]. This method allows charging of battery storage devices while the vehicle is in motion. The vehicle requires less volume of expensive battery storage and the range of transportation is increased [10]. However, a dynamic WCS has to face two main hurdles, large air-gap and coil misalignment, before it becomes widely accepted. The power transfer efficiency depends on the coil alignment and air-gap distance between the source and receiver [5], [11]. The average air-gap distance varies from 150 to 300 mm for small passenger vehicles, while it may increase for larger vehicles. Aligning the optimal driving position on the transmitter coil can be performed easily because the car is driven automatically in the dynamic mode. In addition, different compensation methods, such as series and parallel combinations, are employed on both the transmitting and receiving sides to reduce parasitic losses and improve system efficiency [12], [13]. In this review paper, the fundamental operation of WCS for EVs, including methods of power transfer, is analysed. In addition, a variety of wireless transformer structures are explained in order to improve power transfer efficiency. This paper also outlines current developments in the static and dynamic modes of WEVCS in both the commercial and university sectors.
2. Wireless charging system for EVs
2.1. Basic operating principle
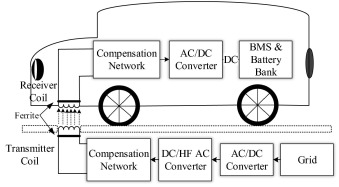
The basic block diagram of the static WCS for EVs is illustrated in Fig. 1. To enable power transfer from the transmission coil to the receiving coil, AC mains from the grid is converted into high frequency (HF) AC through AC/DC and DC/AC converters. In order to improve overall system efficiency, series and parallel combinations based compensation topology are included on both the transmitting and receiving sides [14], [15]. The receiving coil, typically mounted underneath the vehicle, converts the oscillating magnetic flux fields to HF AC. The HF AC is then converted to a stable DC supply, which is used by the on-board batteries. The power control, communications, and battery management system (BMS) are also included, to avoid any health and safety issues and to ensure stable operation. Magnetic planar ferrite plates are employed at both transmitter and receiver sides, to reduce any harmful leakage fluxes and to improve magnetic flux distribution.
 Fig. 1. Basic block diagram of static wireless charging system for EVs.
Fig. 1. Basic block diagram of static wireless charging system for EVs.2.2. Wireless power transfer methods
Since the introduction of wireless charging systems for EVs, four methods for the design of WEVCS have been utilised: traditional inductive power transfer (IPT), capacitive wireless power transfer (CWPT), magnetic gear wireless power transfer (MGWPT) and resonant inductive power transfer (RIPT). Table 1presents the summary of available wireless power transfer technologies for battery operated electric vehicles (BEVs) [1], [3], [7], [16], [17], [18].
Table 1. Overview of dierent methods of Wireless Power Transfer (WPT) for EVs.
| WPT methods | Performance | Price | Size/Volume | Complexity of design | Power Level | Suitability for WEVCS | ||
|---|---|---|---|---|---|---|---|---|
| Efficiency | EMI | Frequency range (kHz) | ||||||
| Inductive | Medium/High | Medium | 10–50 | Medium/High | Medium | Medium | Medium/High | High |
| Capacitive | Low/Medium | Medium | 100–600 | Low | Low | Medium | Low | Low/Medium |
| Permanent magnet | Low/Medium | High | 0.05–0.500 | High | High | High | Medium/Low | Low/Medium |
| Resonant inductive | Medium/High | Low | 10–150 | Medium/High | Medium | Medium | Medium/Low | High |
2.2.1. Capacitive wireless power transfer
The low cost and simplicity of CWPT technology, using advanced geometric and mechanical structures of the coupling capacitors [19], [20], is very useful for low-power applications, such as portable electronics devices [21], cellular phone chargers [22], and rotating machines [23]. Fig. 2 shows a typical schematic diagram of the series resonant circuit based CPWT. In the CWPT, coupling capacitors are utilised to transfer power from the source to the receiver instead of using coils or magnets. The main AC voltage is applied to an H-bridge converter though power factor correction circuitry. High-frequency AC generated by the H-bridge passes through coupling capacitors at the receiver side. Unlike the IPT, the CWPT operates for both high voltage and low current. In order to reduce impedance between transmitter and receiver sides at the resonant arrangement, additional inductors are added in series with the coupling capacitors. This arrangement also helps to enable soft switching into the circuitry. Similarly the received AC voltage is converted to DC for the battery bank or load with the utilisation of rectifier and filter circuitry [24].The power transfer level totally relies on the size of the coupling capacitor and distance between two plates. For a small air gap, CWPT offers excellent performance and better field constraints developed between two plates of the capacitors [25]. To date, the application of CWPT for EVs has been limited due to large air gaps and high power level requirements. Air-gap reduction and high capacitance coupling designs were suggested by [26] for the rotary mechanism. The authors [20] proposed to use the car’s bumper bar as a receiver, to reduce the air gap between the two coupling plates. A stationary laboratory prototype >1 kW was demonstrated with approximately 83% efficiency from the DC source to the battery bank at the 540 kHz operating frequency.
 Fig. 2. Schematic diagram of Capacitive Wireless Power Transfer.
Fig. 2. Schematic diagram of Capacitive Wireless Power Transfer.2.2.2. Magnetic gear wireless power transfer
Magnetic gear WPT (MGWPT) is relatively different to both the CWPT and IPT, as shown in Fig. 3. In this method, two synchronised permanent magnets (PM) are positioned side-by-side in contrast to other coaxial cable based WEVCS. The main power as the current source is applied to the transmitter winding to produce a mechanical torque on the primary PM. With the utilisation of the mechanical torque, the primary PM rotates and induces a torque on the secondary PM through mechanical interaction. In two synchronised PMs, the primary PM works as the generator mode and the secondary PM receives power and delivers it to the battery through the power converter and BMS [3]. A laboratory prototype of 1.6 kW of the MGWPT was developed and is capable of delivering around 150 mm air gap distance. However, this technique has many challenges associated with incorporating the technology into static and dynamic applications. According to [27], at 150 Hz rotators lost their synchronisation speed, which significantly affected the transmitted power. The speed requires constant adjustment, with the advanced feedback system from the battery side to the primary side, in order to prevent the upper power limit from being exceeded. The power transfer capability is inversely proportional to the axis-to-axis separation between the primary and secondary PMs as the coupling between the two synchronised windings reduces abruptly. As a result, it may be usable for stationary WEVCS but considerably challenging for dynamic applications [28].
 Fig. 3. Schematic diagram of magnetic gear based WPT.
Fig. 3. Schematic diagram of magnetic gear based WPT.2.2.3. Inductive power transfer
Traditional IPT was developed by Nikola Tesla in 1914 to transfer power wirelessly. The basic block diagram of the traditional IPT is presented in Fig. 4. It is based on several EV charging structures. IPT has been tested and utilised in a wide variety of areas ranging from milliwatts to kilowatts to transfer contactless power from the source to the receiver. In 1996, General Motors (GM) introduced the Chevrolet S10 EV, which was charged by the magne-charge IPT (J1773) system to provide level 2 (6.6 kW) slow and level 3 (50 kW) fast charges [3]. The primary coil, known as a charging paddle (inductive coupler) of the magne-charge, was inserted into the vehicle charging port where the secondary coil received power and allowed to charge the EV. A 6.6 kW Level 2 EV charger was demonstrated by the University of Georgia, which was able to charge from 200 to 400 V battery voltage at 77 kHz operating frequency. In this universal IPT, a 10 KVA coaxial winding transformer offered significant advantages, such as easy-to-modify power range and flexibility of the inductive coupling design [29], [30].
 Fig. 4. Schematic Diagram of Traditional Inductive Power Transfer.
Fig. 4. Schematic Diagram of Traditional Inductive Power Transfer.2.2.4. Resonant inductive power transfer
The RIPT is one of the most well-known and advanced versions of the traditional IPT, in terms of designing power electronics and wireless transformer coils. Fig. 5 shows the schematic diagram of the RIPT for EVs. Like other WPTs, the main AC voltage is converted into the HF AC source and supplied to the transmitter or primary winding. The receiver or secondary coil receives power via varying magnetic fields. The received power is converted to DC for the battery bank of the EVs through additional power electronics and filter circuitry. In comparison to the traditional IPT, additional compensation networks in the series and/or parallel configurations are added to both the primary and secondary windings not only to create the resonant case as presented in (1) but also to reduce additional losses.(1)where is the resonant frequency of the primary and secondary coils, and and are the self-inductance and resonant capacitor values of the transmitter and receiver coils, respectively. When the resonant frequencies of the primary and secondary coils are matched together, efficient power transfer is possible. The operating frequency of the RIPT ranges from tens of kilohertz to several hundred kilohertz. The magnetic flux generated at this frequency range, without any magnetic core, has a significantly adverse effect on the mutual inductance and hence the reduction of the coupling coefficient (k). The value of the coupling coefficient in the RIPT varies from 0.2 to 0.3 due to the minimum height clearance requirement of the EVs, which is 150–300 mm [31], [32]. Eq. (2) can be applied to calculate the coupling coefficient. and are the self-inductance of the transmitter and receiver coils, respectively. is the mutual inductance between the two coils. If the primary and secondary coils are strongly coupled, the mutual inductance value would be higher, and vice versa.(2)
 Fig. 5. Schematic diagram of Resonant Inductive Power Transfer.
Fig. 5. Schematic diagram of Resonant Inductive Power Transfer.Magnetic ferrite cores in a variety of structures are utilised to improve the coupling coefficient in the wireless transformer design. In the later section, details will be discussed. At high frequency, skin and proximity effects are considerably effective and can affect the power transfer efficiency. In order to avoid such problems, individually insulated thin twisted wire-based litz wire is normally considered in the design. This can also reduce the parasitic resistanceand improve the quality factor (Q) of the coil. The Q can be calculated using (3). Eq. (3) determines the frequency and self-inductance of the primary or secondary coil, and is the resistance of the coils.(3)
2.3. Compensation networks
As presented in Fig. 5, compensation capacitors are added in series and parallel combinations on both the transmitter and receiver sides in the static wireless charging systems for EVs to create RIPT. Four types of compensation network topologies, namely series-series (SS), series–parallel (SP), parallel-series (PS) and parallel-parallel (PP), are shown in Fig. 6. The source compensation is required to eliminate phase difference between current and voltage and to minimise the reactive power in the source [33], [34]. The installation of a secondary compensation network maximises the load power transfer and efficiency [3], [35]. Additionally, the selection of the network topologies relies on the specific application requirements in the WPT. The PS- and PP-compensated WCS are protected so that the source coil does not operate in the absence of the receiver coil. Even though it offers a safe environment, the system is unable to transfer sufficient power in the case of misalignment between the source and the receiver [15]. It also requires additional series inductors to regulate the source current to flow into parallel in the resonant circuit. The value of the capacitor is its reliance on the magnetic coupling and quality factor [14], [36]. The primary compensation capacitor value is not dependent on mutual inductance in SP-based compensated WCS and can offer high power transfer than the graded system. However, it is critically dependent on variation of load [37]. SS-compensated topology is the most suitable for EV applications because it offers two significant advantages [38], [39]. The first advantage is that the value of the capacitor in the source and receiver sides is independent from the load conditions and mutual inductance. As a result, the resonant frequencies of the source and receiver sides are not reliant upon the mutual inductance and loads but depend on self-inductance of the primary and secondary coils [32], [34]. The second advantage is that such systems maintain a unity power factor by drawing active power at the resonant frequency as the reflected impedance from the receiver coil does not add an imaginary part in the transmitter coil [40]. This SS-topology based WCS can offer a better battery charging option because it may offer a constant voltage and current for the battery [15], [41]. Table 2 [3], [15], [42], [43] shows the additional advantages and features of different compensation networks, which are utilised in the WPT for EVs.
 Fig. 6. Compensation topology (a) Series-Series (b) Series-Parallel (c) Parallel-Series (d) Parallel-Parallel.
Fig. 6. Compensation topology (a) Series-Series (b) Series-Parallel (c) Parallel-Series (d) Parallel-Parallel.Table 2. Advantages and features of compensation networks.
| Features | Series-Series (SS) | Series-Parallel (SP) | Parallel-Series (PS) | Parallel-Parallel (PP) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Power transfer capability | High | High | Low | Low | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sensitivity of power factor over distance | Less | Less | Moderate | Moderate | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Alignment tolerance | High | High | Moderate | Low | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Impedance at resonant state | Low | Low | High | High | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Frequency tolerance on efficiency | Low | High | Low | High | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Suitable for EV application | High | High | Moderate | Moderate | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Primary capacitor | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Secondary capacitor | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Load |
2.4. Wireless transformer topologiesIn the wireless charging systems, the transmitter and receiver pads are made of multiple component layers in order to gain maximum power transfer efficiency and lower electromagnetic interference with cost effectiveness. There are three main components of the wireless transformer pads: coil, shielding material (ferrite and aluminium plate), and protective and supportive layers. Fig. 7 shows a variety of views of the wireless transformer pads. 
Fig. 7. Wireless Transformer (a) exploded view (b) Top view (c) Cross-section. 2.4.1. Coil shapesIn WCS for EVs, an air-core wireless transformer concept is used to transfer several watts to kilowatts of power from the source to receiver sides. As shown in Fig. 8, a variety of planar coil shapes such as circular, rectangular, and hybrid arrangements have been utilised in the wireless transformer designs to improve performance and to solve misalignment problems between the transmitter and receiver pads [44]. Wireless charging coils are categorised in two main areas: polarised pads (PPs) and non-polarised pads (NPPs). Polarised pads are created from multiple coils and shapes to generate perpendicular (vertical) and parallel (horizontal) components of the flux. In contrast, non-polarised pads are constructed from the single coil shape to produce only perpendicular (vertical) components of the flux [45]. NPPs are the traditional shaped coils, such as circular, square, rectangular and hexagonal. The circular coil is a well-known and widely used structure in wireless transformers because eddy current in this structure is kept to a minimum (there are no sharp edges). By adjusting internal diameter, the magnetic flux distribution can be controlled. For smaller centre diameters, the magnetic field lobe would be a spike shape, which can help to improve the coupling coefficient. Increasing the centre diameter can expand the magnetic flux distribution areas with lower amplitude compromise, which can assist in misalignment problems [46]. When the offset distance between two windings reaches around ±40%, the receiver power reduces to minimal [47]. Square and rectangular shape coils are suitable when they require arrangement in an array due to perfectly aligned sides. However, they increase inductance because the sharp corner edges generate eddy current and increase impedance and hot spots. This makes it unsuitable for high-power applications. Rectangular shape coils demonstrate greater horizontal misalignment tolerance in comparison to the circular and square coils. However, hexagonal coil shapes present the maximum power transfer efficiency at the central position of the transmitter and receiver coils, but with a significant reduction in the power when it reaches the edge of the coil [48]. Oval shaped coils provide more tolerance with misalignment but these are not suitable for high power applications [15]. Due to poor performance on the horizontal misalignment, PPs are invented by arranging multiple shape coils in a variety of arrangements. Such shapes are not only suitable for single-phase applications, but also for three-phase applications. Solenoidal coil, double D (DD), Double D quadrature (DDQ), bipolar (BP) and Quad D quadrature (QDQ) are examples of the PPs pads or coupler. Solenoidal coils are created by winding coils around the flat ferrite plate, which can produce polarised sharp arching magnetic fluxes on both sides of the coupler. This can be done by magnetically connecting two wound coils in series and electrically in parallel. Such polarised fluxes are higher than the NPP’s fluxes [7], [49]. Double D (DD) polarised pads are created from two square or rectangular coils that generate flux in only one direction (opposite to the ferrite plate) with minimal leakage fluxes at the edge. It offers significant advantages in that it covers both horizontal (X & Y) and vertical directions. In addition, this design can provide an excellent coupling coefficient and quality factors for the unloaded coil. Due to higher tolerance of the horizontal misalignment, this pad can be suitable for primary coupling in stationary and dynamic applications [50], [51]. The Double D quadrature (DDQ) coil is the advanced version of the DD pad with the production of a twice flux height compared to the circular pad. In addition to the DD pad’s features, it also provides significant improvement on the lateral misalignment issues with the Q coil manufacturing versatility. The DDQ coupler is suitable for the single or three-phase power source application, either primary or secondary. It can be an excellent choice as a secondary pad due to its ability to grab both sine and cosine magnetic flux vectors [50], [52], [53]. Bi-polar (BP) charging pads are constructed from multiple similar size coils. In comparison to the DDQ pad, BP requires around 25 to 30% less copper for the construction. However, it drops 13% in coupling coefficient with 30° angular misalignment between the primary and secondary coils in single or three-phase applications[51]. Quad D quadrature (QDQ) pads have been suggested to improve the overall performance, including misalignment and flux height to reach the receiver. Such shapes utilise two or more circular and square coils in order to design wireless transformers [54]. QDQ pads offer a significantly higher coupling coefficient (0.33 at 150 mm air gap) and are able to transfer sufficient power with 50% misalignment displacement [15] Fig. 9. 
Fig. 8. Coil shapes (a) Circular (b) Square (c) Rectangular (d) Double D (e) Bi-polar (f) Double-D quadrature (g) Quad-D quadrature. 
Fig. 9. Ferrite shapes (a) Circular (b) circular striated (c) square (d) rectangular (e) T-core (f) U-core (G) E-core (h) Double U (i) striated blocks. 2.4.2. Magnetic ferrite shapesAnother important component of the wireless transformer is magnetic ferrite structure. In the WEVCS, the magnetic flux is generatedin medium to high power ranges. This would be high and there is a need to meet safety standards to avoid any health and safety issues. In addition, it affects coupling efficiency between two windings, particularly if there is no shielding to reduce the leakage fluxes. Proper design of magnetic ferrite cores can not only assist to redirect path to magnetic fluxes from primary to secondary, but also improve mutual inductance and self-inductance of the coils [61]. The selection of ferrite core depends on multiple factors including size, shape, permeability, operating frequency and cost. Basic ferrite shapes such as circular, square and rectangular (as demonstrated in E-core and U-core) have been utilised in the source pad as well as on the receiver side to reduce leakage fluxes in the WCS for EVs [65]. Circular hollow and circular arranged ferrite bars have been modified to reduce either weight or cost, or adjusted depending on the application. Even though EE-core, U-core, ETD and pot ferrite shapes offer a higher coupling coefficient, they are not suitable due to their height, because EVs have limited standard ground clearance. Striated ferrite structures have also been utilised to create a variety of shapes and sizes to reduce leakage inductance and enhance cost effectiveness. Higher permeability materials, such as Mn-Zn, are the best option for such application because of affordability and availability. In WEVCS, aluminium plating offers two significant functions: shielding material and structure integrity. Aluminium construction reduces flux leakages and improves the coupling coefficient in the WCS for EVs through means of eddy currents [3]. The utilisation of the aluminium plate sizes are generally a few millimetres to some millimetres (5), which is higher than the skin depth of the WCS’s operating frequency range from 20 kHz to 100 k Hz. When the magnetic fluxes try to pass through the aluminium structure, it prevents penetration through the surface thickness and forces them to increase the length of the magnetic flux contour as a result. This weakens the value of the magnetic fluxes due to higher magnetic path resistance. Aluminium plates are mostly placed underneath the ferrite structures because without the ferrite the mutual inductance of the coils is greatly reduced [43]. In addition, ferrite plates are very fragile and may be constructed from the multiple planar blocks due to limited availability of the larger planar ferrite plates on the market. 2.4.3. Protective and supportive structureIn WEVCS, the transmitter pad is mounted underneath the concrete structure of the road and is able to handle a car’s weight and additional vibration of the vehicle. In order to improve structure stability, the top and bottom players of the charging pads are manufactured from a PVC plastic sheet. The length and width are dependent on the charging pad size and thickness and vary in size from 5 mm to 20 mm. Sometimes transparent acrylics are also added around the coil for support and to enhance the appearance of the charging pad. 2.5. Health and safety concernsWEVCS offer important advantages over the plug-in charging systems. However, it also comes with three major potential health and safety issues— electrical, magnetic, and fire hazards. WEVCS operates in high current and voltage levels. This can create electrical shock risk due to malfunction or accidental damage to the device, resulting from environmental conditions (hot or cold) and physical damage. In addition, level 1 (3.7 kW) and level 2 (7.7 kW) WEVCS are mostly installed in houses, dormitories, and general parking areas where the transmitter charging pads are installed into the ground or concrete. This kind of arrangement requires additional safety regulations to provide protection and to avoid any life threatening situations. Magnetic fluxes generated at high power levels may surpass the minimum standards and regulations set by the standards agencies, and be harmful to the general community. In order to protect the surrounding flora and fauna, electromagnetic compatibility (EMC) and electromagnetic interference (EMI) need to investigate which can solve the dilemma of the technology safety features (this sentence regarding EMC and EMI is unclear). In addition, high power transfer from the transmitter to the receiver’s charging pads is happening at large air gaps from 150 mm to 300 mm at some kilohertz to a few megahertz. As a result, high frequency leakage fluxes are generated due to large air gaps. The level of such exposure fluxes must be below or meet the human exposure guidelines (IEEE C.95.1 2005 [66], ICNIRP1998 (0 Hz-300 GHz), and ICNIRP 2010 (0 Hz-100 kHz) [67]) for a variety of human body parts [3]. The values of allowable limits have been specified in terms of maximum permission exposure (MPE) and specific absorption ratio (SAR) [68]. For example, a person with health monitoring devices, such as a pacemaker, may have potential health issues if they are exposed to leakage fluxes. This may occur if sitting inside the car when the car is wireless or walking or standing nearby the wireless charging pads. A variety of magnetic ferrite shapes have been presented with the FEM simulation to verify the effect of EMC and EMI issues to solve such problems [61], [69]. In addition, many ongoing research and development prototypes have been developed and tested to create user-friendliness of the WEVCS. High power level devices always pose a fire risk due to faults or breakdowns in the electronic or mechanical components. This can create life threatening conditions in houses or parking spaces. For example, cable insulation or failure of the switch devices can short circuit and cause a fire. In order to avoid such performance issues, rules, regulations and manufactured standards must be in place. This includes weather conditions because temperature in some countries varies from extremely cold to hot during the course of a year. Overall, WEVCS requires health and safety standards from design, construction, manufacturing and installation (including maintenance) to avoid any major concern for the user. 2.6. Health and safety standardsIn order to create a user-friendly environment for the WEVCS, it is vital to define standards for efficiency, power level, operating frequency, EMI, EMC, and safety and testing for the research and commercialisation of the technology. Many international organisations’ task forces, such as the Society of Automotive Engineers (SAE), International Electro Technical Commission (IEC), Institute of Electrical and Electronics Engineers (IEEE), and Underwriters Laboratories (UL) have been working with research institutes, governments, universities, and EV automotive industries to enable commercialisation. The International Commission on Non-Ionizing Radiation Protection (ICNIRP), Federal Communications Commission (FCC) and American Association of Medical Instrumentation (AAMI) based electromagnetic societies are referred to regarding agreements on EMC levels, EMF limits and compatibility with health monitoring medical implanted devices, such as pacemakers [70]. It is regrettable that aspects of standardisation and interoperability are not completely developed because there are some major obstacles to the deployment of this technology. Table 3 presents the list of announced and on-going updated WEVCS related standards from all over the world. International standards cover the transmitter side (ground assembly) and receiver structure (vehicle assembly), including modifications or upgradability on the EVs/PHEVs for research and commercialisation purposes. For example, SAE international announces TIR J2954 wireless power transfer standards for PHEVs and EVs with a common operating frequency range between 81.39 and 90 kHz for light duty and passengers cars, as shown in Table 4 [55]. In addition, this standard includes power levels, electromagnetic limits, and minimum efficiency for the experimental and demonstrated purpose of the WEVCS. The SAE J2954 WPT committee carried out a wide variety of validation tests on bench (standardisation tests) and vehicle levels (full vehicle tests). In future, additional standards will be announced for the alignment methodology, dynamic WEVCS, and wireless bi-directional power transfer. Table 3. List of international standards for WEVCS.
Table 4. SAE Internal Standards (J2954) for PHEV/EV Wireless Charging.
2.7. Challenges and hurdles to the deployment of WEVCSEven though WEVCS provide more advantages over plug-in chargers, challenges associated with health and safety, finances, power range limitations, infrastructure development and maintenance need to be overcome before deployment is possible. Health and safety concerns, such as EMC, fire, and electrical hazards have been pointed out with the current development of the standards in Sections 2.5 Health and safety concerns, 2.6 Health and safety standards, respectively. Another significant hurdle to the wider acceptance of the WEVCS is the power range limitations compared to the plug-in chargers. The AC Level 1 (1.4–1.9 kW) and 2 (3.3 to 20 kW) on-board charging systems can provide a range of between 2 and 20 miles per hour of charge. DC fast charging (up to 100 kW) can add up to between 60 and 80 miles of range in 20 min [3], [91], [92], [93]. So far, WPT classes for static mode can go up to 22 kW as per the new J2954 standards. They are still in the research and development phase. In order to overcome such issues, advanced network of static and dynamic wireless charging stations require to install on the roads. Such network demands for a new infrastructure development due to incompatibility with the current arrangements. This can result in additional financial requirements to governmental organisations as the starting cost of WEVCS Level 1 (3.3 kW) can be approximately $2470 [71]. For the dynamic WCS, with a charging power level of 200 kW, it can cost an estimated A$2M/km/lane [94]. This is unaffordable for developing and underdeveloped countries. As it is a costly investment, maintenance of the structure is very crucial to avoid any major losses due to improper handling, wear and tear, and limitations of foreign object identification (FOI) [95]. Overall, in order to successfully deploy WEVCS, a wide variety of experimental with simulation scenarios-based approaches are suggested to create user-friendly international standards which can ensure worldwide consistency. 3. Application of WEVCSDepending on their applications, wireless electric vehicle charging systems can be separated into the following two important scenarios to transfer power from the source to the battery bank and into the car. 3.1. Static wireless electric vehicle charging system (S-WEVCS)WEVCS unlocks another door to provide a user-friendly environment for consumers (and to avoid any safety related issues with the plug-in chargers). Static WEVCS can easily replace the plug-in charger with minimal driver participation, and it solves associated safety issues such as trip hazards and electric shock. Fig. 10 shows the basic arrangement of static WEVCS. The primary coil is installed underneath in the road or ground with additional power converters and circuitry. The receiver coil, or secondary coil, is normally installed underneath the EVs front, back, or center. The receiving energy is converted from AC to DC using the power converter and is transferred to the battery bank. In order to avoid any safety issues, power control and battery management systems are fitted with a wireless communication network to receive any feedback from the primary side. The charging time depends on the source power level, charging pad sizes, and air-gap distance between the two windings. The average distance between lightweight duty vehicles is approximately 150–300 mm. Static WEVCS can be installed in parking areas, car parks, homes, commercial buildings, shopping centres, and park ‘n’ ride facilities. Many prototypes have been developed by universities at research and commercial levels, as presented in Table 5 [1], [3], [17], [32], [81]. Their prices vary from approximately USD 2700–13,000 from charging levels 3.3–7.2 kW[71]. Their power levels meet with the recently announced international SAE standards (J2954) power class for levels 1 (3.3 kW) and 2 (7.7 kW), including frequency ranges 81.9–90 kHz[55]. Currently, the SAE organisation is working on the standards, which are related to allowable misalignment and the installation location of the receiver pads in the car. A number of prototypes have been presented with various mounting locations, such as front, rear, and center of the receiver pads on the underneath of the car. The Oak Ridge National Laboratory (ORNL) is mostly focusing on improving power transfer efficiency by coil designing while the University of Auckland has proposed some hardware and software (including charging pad development) to improve plug-in efficiency. Overall, prototypes or lab experiments of stationary WCS for EVs have been developed from power ranges 1–20 kW, air-gap distance 100–300 mm with efficiency from 71 to 95%. 
Fig. 10. Basic diagram of Static wireless electric vehicle charging system. Table 5. Development in stationary wireless charging systems. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||